AGV Navigation Methods 2: Virtual Path Following
In part one of this guide, we discussed AGV navigation methods that follow physical lines or tags. Here in part 2 we explore guidance technologies that follow virtual paths instead.
In this article, we discuss the newer generation of AGV navigation methods, which involve a vehicle following virtual (or digital) paths that are created using a vehicle’s software, rather than being laid on the shop floor.
Laser triangulation
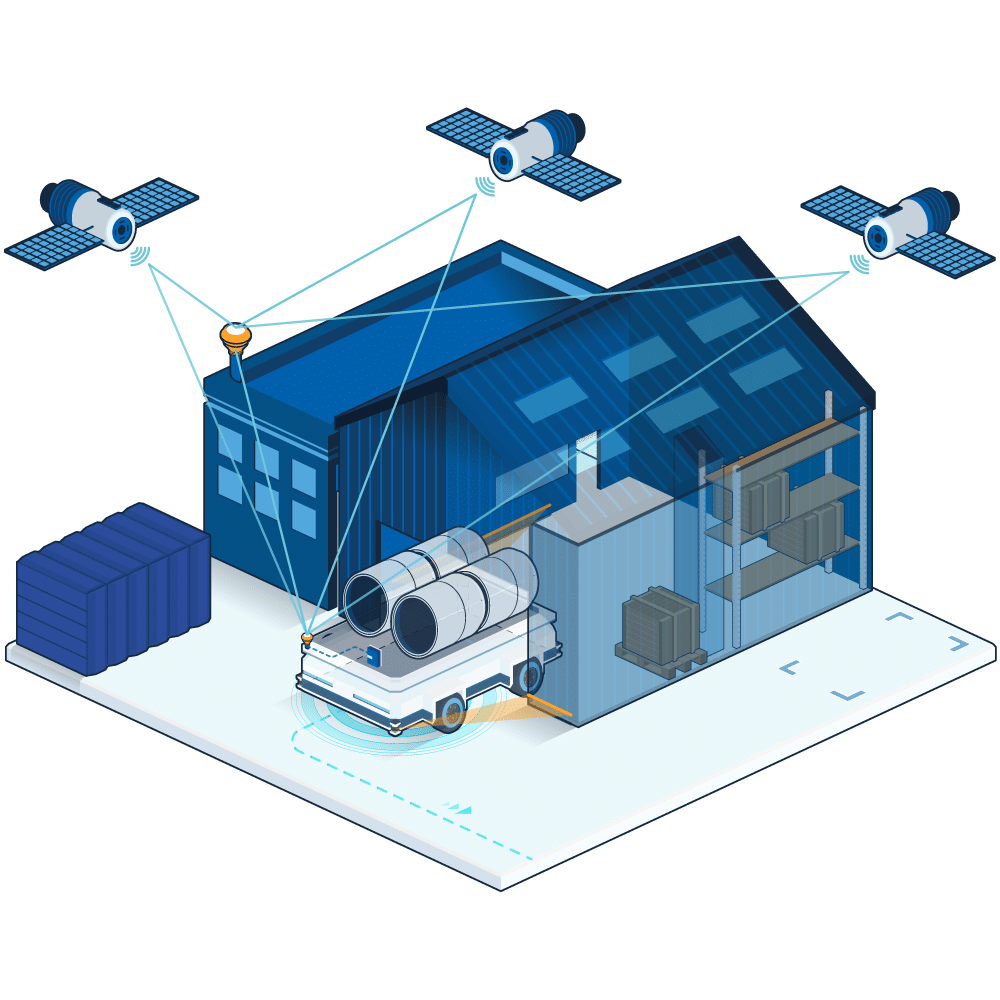
The working principle of laser triangulation (sometimes called laser target navigation or simply laser navigation) is similar to GPS navigation.
Laser triangulation uses a minimum of three references to triangulate the position of the vehicle. Unlike GPS however, which uses satellites, this methodology utilizes a laser scanner that sits on top of the vehicle. Its beams are reflected off reflective targets that are professionally installed in the environment.
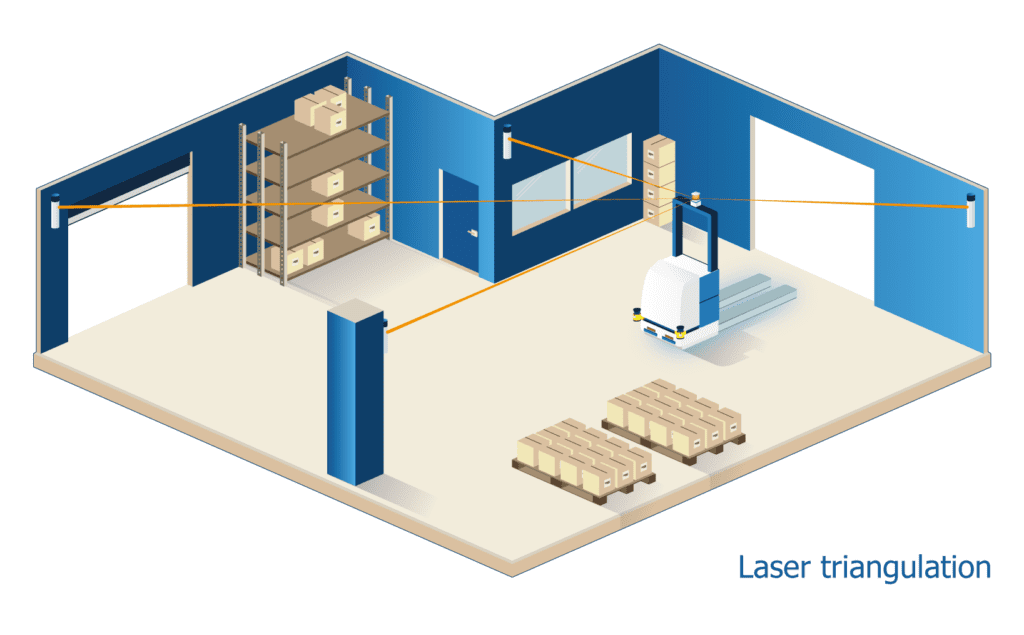
Unlike line and tag following AGVs, where the logic of the mission is described by what is on the floor, with triangulation the logic is instead programmed using software.
As with line-following, laser triangulation technology is exceptionally reliable. It is capable of high positioning accuracy (required for efficient picking, dropping, and vehicle charging), and relatively fast vehicle speeds are possible.
What’s more, since this technology uses virtual paths instead of physical ones, maintenance costs are lower and effective fleet and traffic management are much easier than with line following and tags. Route modifications are also quick and simple – unless significant changes demand the installation of additional on-site reflectors.
However, there are drawbacks:
- Laser triangulation systems can take a lot of time to design and install. The work starts in computer aided design (CAD) software, which a technician typically uses to design the layout of reflectors across the site. This is followed by the installation of the reflectors themselves, followed by several days’ work by a qualified surveyor to accurately measure the reflectors’ positions and create the map the AGVs will use.
- The LiDAR laser scanners used for vehicle positioning (also called localization) are typically mounted high on the vehicle in order to identify reflectors and avoid humans or moveable objects that might hide these references. This additional component increases vehicle cost and effectively constrains a vehicle maker to certain types of vehicle as, for example, there is nowhere to place such an extra sensor on an automated guided cart (AGC) or ‘mouse’ AGV.
Laser triangulation: strengths and weaknesses

Vision guidance
Vision guidance is similar to how humans look at the world. It uses cameras in place of our eyes to recognize features in the environment. These are then compared to a 3D map, allowing the vehicle to calculate its position and navigate.
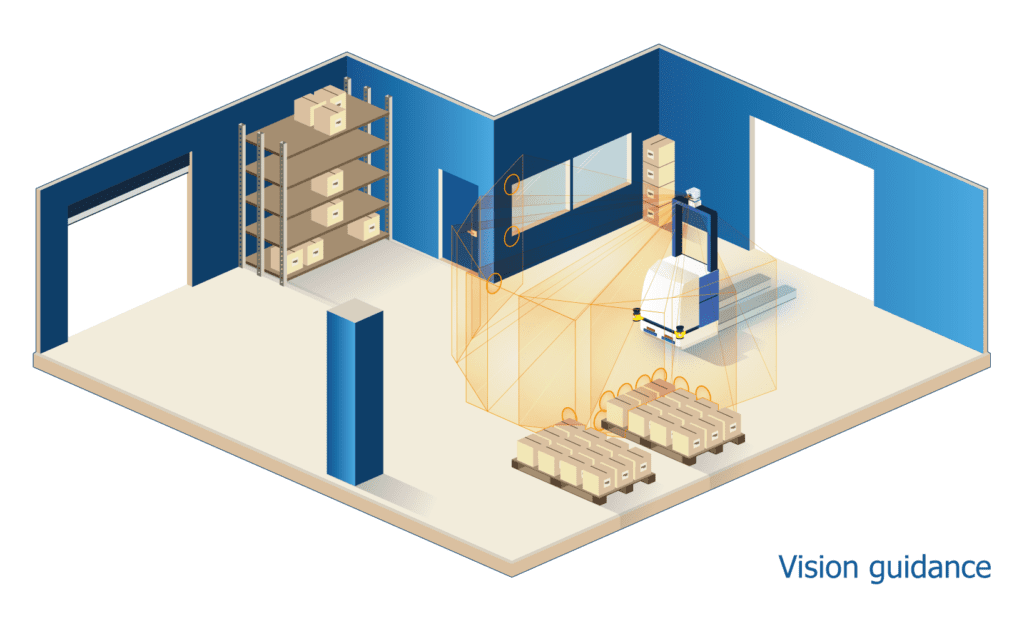
The installation of vision guidance AGVs is fairly simple and quick, as vision guidance does not require any alterations to a site’s existing infrastructure: the user simply drives the vehicle along the route, continuously collecting images all the while, in order to learn the path and construct the 3D map.
The time and costs of maintaining a vision-based system are also low, as changing routes just requires an operator to re-teach the vehicle, driving it manually around the new routes required.
However, this technology suffers from the usual drawbacks associated with vision-based systems:
- Changes in lighting conditions, such as glare or darkness, can impact the system’s accuracy.
- Camera and image resolution can have similar effects, as can changes in the environment.
Vision guidance: strengths and weaknesses

Natural feature navigation
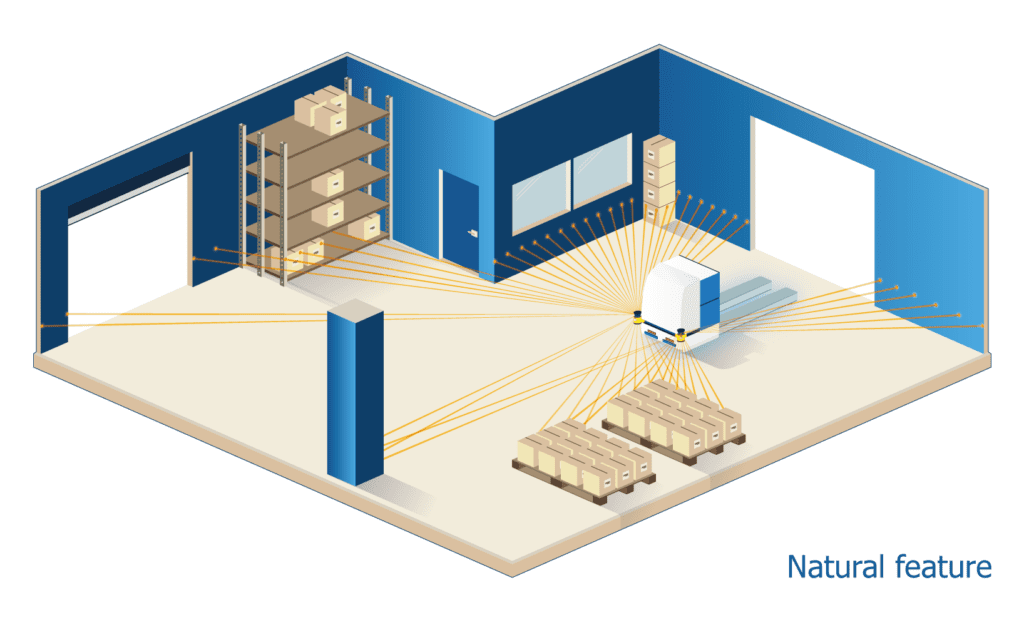
Natural feature navigation (sometimes called natural or SLAM navigation) uses laser scanners, such as a vehicle’s built-in safety scanners. It compares the current 2D scanned image to a map, created previously, to calculate the vehicle’s position.
Natural feature navigation technology works in one of two ways. These approaches are:
- Scan matching – scanner data is compared to, and constantly updates, a reference map.
- Feature matching – data is compared to permanent ‘features’ in the environment, such as walls and columns, without overwriting the reference map.
With scan matching, the raw laser data gathered is compared to the original map and this map is updated if new objects are detected. This approach requires the scan to be of high quality in order to match correctly. The type of map used – grid-based with low cell resolution – can have an adverse effect on a vehicle’s positioning accuracy.
By contrast, with feature matching, a relatively small number of permanent environmental features – such as walls, columns and permanently installed machinery – are used as references to localize the vehicle. This method is highly robust as it requires few references (i.e. 5% of the environment or less) to ensure a vehicle’s accurate localization.
Plus, as the map never changes – unless required by a major infrastructure change such as moving walls – accuracy is retained over time.
Minimal infrastructure changes
Unless most competing AGV navigation methods, with natural feature technology there is no need for heavy on-site infrastructure changes, such as installing inductive wires or magnets, laying tape or setting up reflectors for triangulation. As a result, AGVs driven by this technology are simple and economical to both install and maintain, whether a single automated guided vehicle or a large fleet of AGVs.
Similar to vision guidance, natural feature technology is simple to install because it requires minimal infrastructure changes. At most, a few reflective stickers might be needed if an area has very few natural features.
Similar to laser triangulation, natural feature navigation employs dedicated software tools that are used to program a vehicle’s routes and actions during installation.
However, as natural feature is still a relatively new technology, most suppliers do not yet offer advanced or very intuitive software tools, which can make installation a complex process. Scan matching-based natural feature navigation, for example, is often based on frameworks such as the open-source Robotic Operating System (ROS), which provides a simple entry point for such manufacturers but requires lots of time and high investment to industrialize.
An additional component
As with laser triangulation systems, many scan-matching suppliers recommend a vehicle maker install a laser scanner – dedicated to navigation – high up on the vehicle, rather than using a vehicle’s ankle-height safety laser scanners for positioning data. This approach adds to the vehicle’s cost – it’s another component to buy – and restricts the types of vehicles that can be produced.
On the plus side, modifying installations (updating routing, changing actions) with natural feature navigation is a quick and efficient process, since paths are virtual and there are no time-consuming infrastructure changes required.
Fleet management functionality is also widely available. But since many natural feature suppliers are new to the market, advanced fleet solutions remain few and far between.
Natural feature navigation: strengths and weaknesses

Natural feature navigation with ANT
Unlike other natural feature technologies, Autonomous Navigation Technology (ANT) by BlueBotics uses a feature-matching approach. This means the map it uses for vehicle localization is based on features rather than scan matching’s grid-based map — features are compared to features, rather than laser points to laser points.
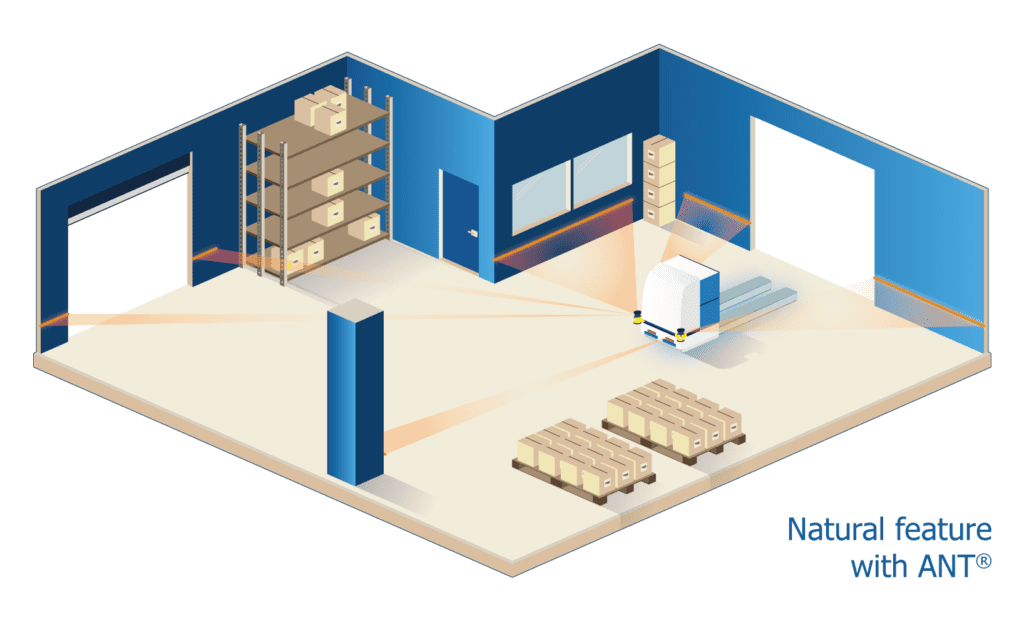
Similar to other natural feature solutions, ANT is simple and quick to install, with minimal infrastructure changes required. Since paths are virtual, the maintenance and modification of routes is also fast and cost-effective. In general, ANT offers similar accuracy and reliability as the established laser triangulation technologies.
Given BlueBotics’ 20 years of experience in the industrial AGV market, in contrast to other natural feature offerings, ANT is a notably more mature product. In addition, because ANT maps are feature-based and not grid-based, they are exceptionally light in terms of file size and therefore simpler for companies to handle.
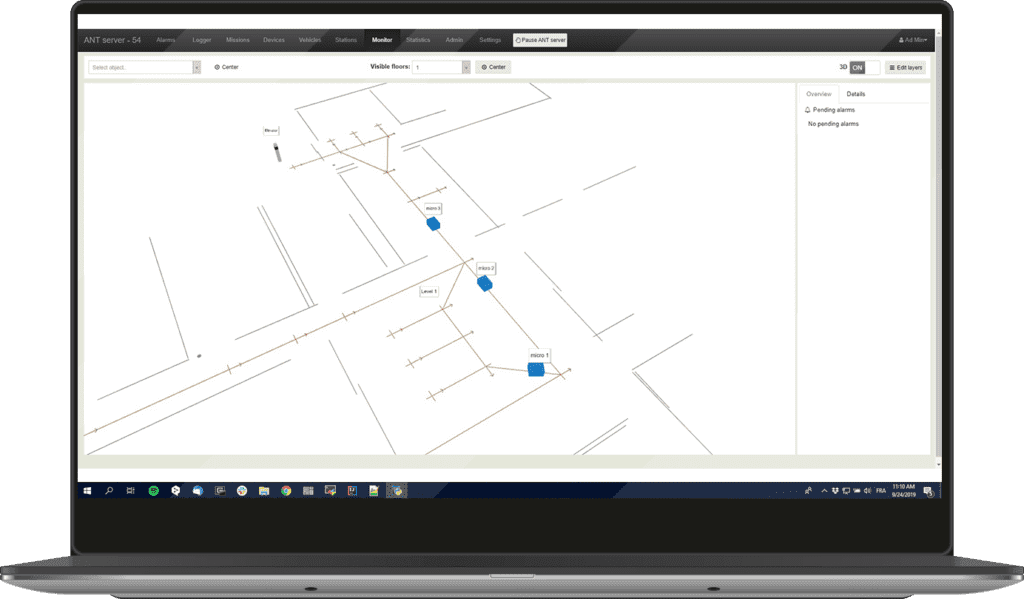
When it comes to installing and managing fleets of AGVs, BlueBotics’ ANT server fleet management software makes creating and managing vehicle missions straightforward, including traffic management.
Uniquely, ANT server is also vehicle-independent, meaning different types (and even brands) of ANT driven vehicle can work together seamlessly, widening a user’s choice.
Natural feature navigation with ANT: strengths and weaknesses

In summary, ANT navigation offers a shorter installation time and lower infrastructure cost than most AGV navigation methods. It is also accurate, reliable, and offers advanced fleet management through its optional ANT server software.
Comparing AGV navigation methods

Compared to the other AGV navigation methods discussed in this and the previous post in this series, natural feature navigation technology out-performs other guidance systems.
ANT fits approximately between laser triangulation and scan-based natural navigation in the marketplace, offering vehicle makers and end AGV users the best of both worlds: the speed and flexibility of natural feature navigation with the triangulation-like maturity and functionality of a solution that has been in the market for years.
Watch: AGV navigation webinar
To hear BlueBotics’ experts compare today’s different AGV navigation methods, don’t miss this exclusive webinar.
Let's get Started
Take the first step to automating your vehicle.
Schedule a call with our expert team today.