Metodi Di Navigazione AGV 2: Ercorso Virtuale Seguente
Nella prima parte di questa guida, abbiamo discusso i metodi di navigazione AGV che seguono linee o tag fisici. Qui nella parte 2 esploriamo le tecnologie di guida che seguono invece percorsi virtuali.
In questo articolo, discutiamo la nuova generazione di metodi di navigazione AGV, che coinvolgono un veicolo che segue percorsi virtuali (o digitali) creati utilizzando il software di un veicolo, piuttosto che essere posati in officina.
Triangolazione laser
Il principio di funzionamento della triangolazione laser (a volte chiamata navigazione con target laser o semplicemente navigazione laser) è simile alla navigazione GPS.
La triangolazione laser utilizza un minimo di tre riferimenti per triangolare la posizione del veicolo. A differenza del GPS, tuttavia, che utilizza i satelliti, questa metodologia utilizza uno scanner laser che si trova sulla parte superiore del veicolo. I suoi raggi vengono riflessi da obiettivi riflettenti installati professionalmente nell’ambiente.
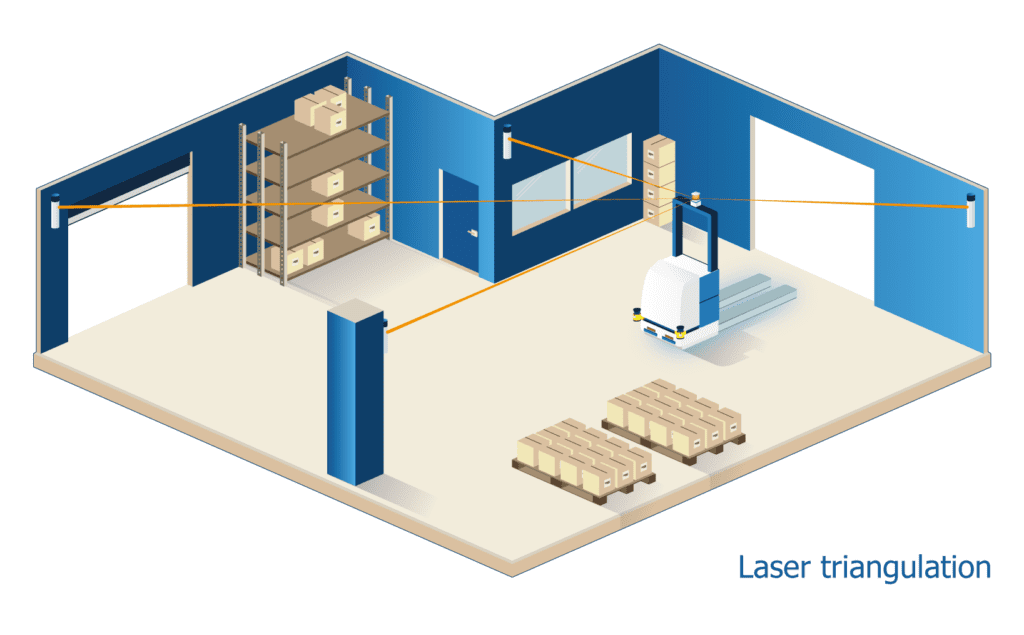
Gli AGV guidati dalla triangolazione laser si basano sull’identificazione di riflettori, che devono essere installati professionalmente. A differenza degli AGV line e tag following, dove la logica della missione è descritta da ciò che è a terra, con la triangolazione la logica viene invece programmata tramite software.
Come per la linea che segue, la tecnologia di triangolazione laser è eccezionalmente affidabile. È in grado di garantire un’elevata precisione di posizionamento (necessaria per un efficiente prelievo, rilascio e ricarica del veicolo) e sono possibili velocità del veicolo relativamente elevate.
Inoltre, poiché questa tecnologia utilizza percorsi virtuali anziché fisici, i costi di manutenzione sono inferiori e la flotta efficace e la gestione del traffico sono molto più semplici rispetto a quelli che seguono la linea e i tag. Anche le modifiche al percorso sono rapide e semplici, a meno che modifiche significative non richiedano l’installazione di riflettori aggiuntivi in loco.
Tuttavia, ci sono degli svantaggi:
- I sistemi di triangolazione laser possono richiedere molto tempo per la progettazione e l’installazione. Il lavoro inizia con il software CAD (Computer Aided Design), che un tecnico utilizza in genere per progettare il layout dei riflettori in tutto il sito. Segue l’installazione dei riflettori stessi, seguita da diversi giorni di lavoro da parte di un geometra qualificato per misurare con precisione le posizioni dei riflettori e creare la mappa che gli AGV utilizzeranno
- Gli scanner laser LiDAR utilizzati per il posizionamento del veicolo (chiamati anche localizzazione) sono generalmente montati in alto sul veicolo per identificare i riflettori ed evitare persone o oggetti mobili che potrebbero nascondere questi riferimenti. Questo componente aggiuntivo aumenta il costo del veicolo e limita efficacemente un produttore di veicoli a determinati tipi di veicoli poiché, ad esempio, non c’è nessun posto dove posizionare un tale sensore aggiuntivo su un carrello a guida automatica (AGC) o AGV “mouse”.
Triangolazione laser: punti di forza e debolezze

Guida alla visione
La guida visiva è simile a come gli esseri umani guardano al mondo. Utilizza telecamere al posto dei nostri occhi per riconoscere le caratteristiche nell’ambiente. Questi vengono poi confrontati con una mappa 3D, consentendo al veicolo di calcolare la sua posizione e navigare.
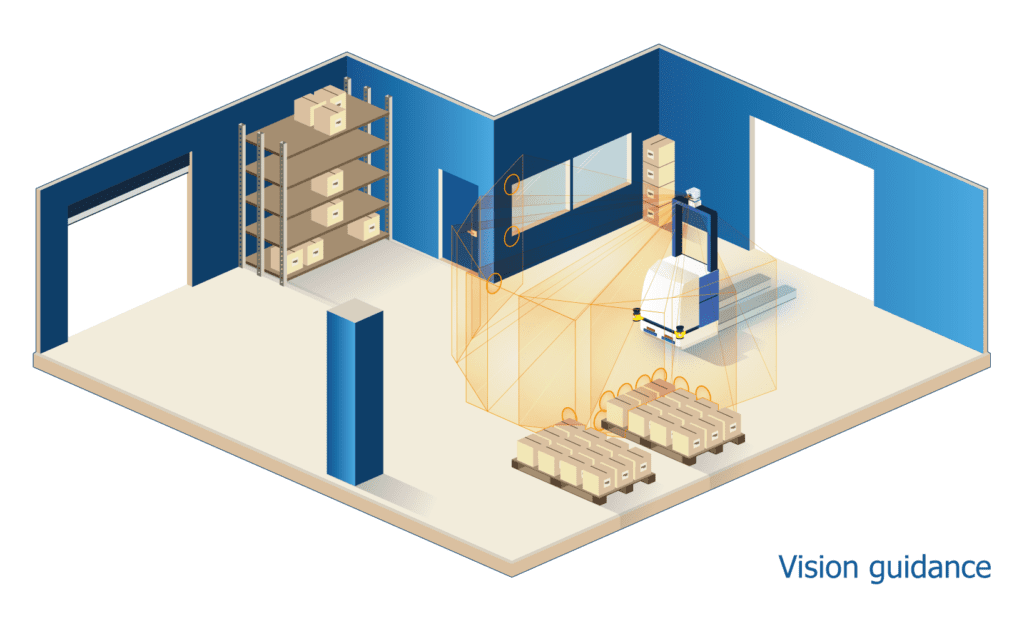
L’installazione degli AGV di guida visiva è abbastanza semplice e veloce, poiché la guida visiva non richiede alcuna modifica all’infrastruttura esistente di un sito: l’utente semplicemente guida il veicolo lungo il percorso, raccogliendo continuamente immagini per tutto il tempo, al fine di apprendere il percorso e costruire la mappa 3D.
Anche i tempi ei costi di manutenzione di un sistema basato sulla visione sono bassi, poiché il cambio di percorso richiede solo che un operatore riattivi il veicolo, guidandolo manualmente lungo i nuovi percorsi richiesti.
Tuttavia, questa tecnologia soffre dei soliti inconvenienti associati ai sistemi basati sulla visione:
- I cambiamenti nelle condizioni di illuminazione, come l’abbagliamento o l’oscurità, possono influire sulla precisione del sistema.
- La risoluzione della fotocamera e dell’immagine può avere effetti simili, così come i cambiamenti nell’ambiente.
Guida alla visione: punti di forza e punti di debolezza

Caratteristiche naturali di navigazione
La navigazione con funzioni naturali (a volte chiamata navigazione naturale o SLAM) utilizza scanner laser, come gli scanner di sicurezza integrati di un veicolo. Confronta l’immagine scansionata 2D corrente con una mappa, creata in precedenza, per calcolare la posizione del veicolo.
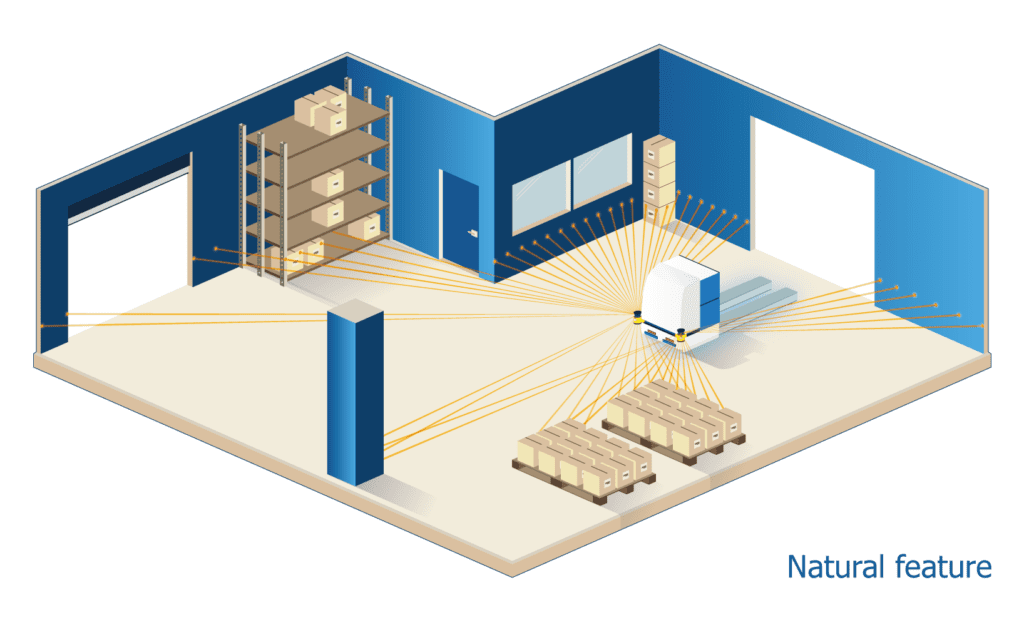
La tecnologia di navigazione con caratteristiche naturali funziona in due modi. Questi approcci sono:
- Scansione di corrispondenza: i dati dello scanner vengono confrontati e aggiornati costantemente con una mappa di riferimento.
- Corrispondenza delle caratteristiche: i dati vengono confrontati con le “caratteristiche” permanenti nell’ambiente, come muri e colonne, senza sovrascrivere la mappa di riferimento.
Con la corrispondenza della scansione, i dati laser grezzi raccolti vengono confrontati con la mappa originale e questa mappa viene aggiornata se vengono rilevati nuovi oggetti. Questo approccio richiede che la scansione sia di alta qualità per corrispondere correttamente. Il tipo di mappa utilizzata, basata su griglia con una bassa risoluzione delle celle, può avere un effetto negativo sulla precisione di posizionamento di un veicolo.
Al contrario, con la corrispondenza delle caratteristiche, un numero relativamente piccolo di caratteristiche ambientali permanenti – come muri, colonne e macchinari installati in modo permanente – viene utilizzato come riferimento per localizzare il veicolo. Questo metodo è molto robusto in quanto richiede pochi riferimenti (ad esempio il 5% dell’ambiente o meno) per garantire la localizzazione accurata di un veicolo.
Inoltre, poiché la mappa non cambia mai, a meno che non sia richiesto da un cambiamento importante dell’infrastruttura come lo spostamento dei muri, la precisione viene mantenuta nel tempo.
Cambiamenti infrastrutturali minimi
A meno che la maggior parte dei metodi di navigazione AGV della concorrenza, con la tecnologia delle caratteristiche naturali, non sia necessario apportare pesanti modifiche all’infrastruttura in loco, come l’installazione di cavi o magneti induttivi, la posa di nastri o l’installazione di riflettori per la triangolazione. Di conseguenza, gli AGV azionati da questa tecnologia sono semplici ed economici sia da installare che da mantenere, sia che si tratti di un singolo veicolo a guida automatizzata che di un’ampia flotta di AGV.
Simile alla guida alla visione, la tecnologia delle caratteristiche naturali è semplice da installare perché richiede modifiche minime all’infrastruttura. Al massimo, potrebbero essere necessari alcuni adesivi riflettenti se un’area ha pochissime caratteristiche naturali.
Simile alla triangolazione laser, la navigazione con funzioni naturali impiega strumenti software dedicati che vengono utilizzati per programmare i percorsi e le azioni di un veicolo durante l’installazione.
Tuttavia, poiché la funzionalità naturale è ancora una tecnologia relativamente nuova, la maggior parte dei fornitori non offre ancora strumenti software avanzati o molto intuitivi, che possono rendere l’installazione un processo complesso. La navigazione delle caratteristiche naturali basata sulla corrispondenza della scansione, ad esempio, è spesso basata su framework come il Robotic Operating System (ROS) open source, che fornisce un semplice punto di ingresso per tali produttori ma richiede molto tempo e investimenti elevati per l’industrializzazione.
Un componente aggiuntivo
Come per i sistemi di triangolazione laser, molti fornitori di abbinamento delle scansioni consigliano a un produttore di veicoli di installare uno scanner laser – dedicato alla navigazione – in alto sul veicolo, piuttosto che utilizzare scanner laser di sicurezza all’altezza della caviglia del veicolo per i dati di posizionamento. Questo approccio si aggiunge al costo del veicolo – è un altro componente da acquistare – e limita i tipi di veicoli che possono essere prodotti.
Tra i lati positivi, la modifica delle installazioni (aggiornamento del routing, modifica delle azioni) con la navigazione naturale delle funzionalità è un processo rapido ed efficiente, poiché i percorsi sono virtuali e non sono necessarie modifiche all’infrastruttura che richiedono tempo.
Anche la funzionalità di gestione della flotta è ampiamente disponibile. Ma poiché molti fornitori di caratteristiche naturali sono nuovi sul mercato, le soluzioni avanzate per la flotta rimangono poche e lontane tra loro.
Caratteristiche naturali di navigazione: punti di forza e punti di debolezza

Caratteristiche naturali navigazione con ANT
A differenza di altre tecnologie di funzionalità naturali, la tecnologia di navigazione autonoma (ANT) di BlueBotics utilizza un approccio di corrispondenza delle funzionalità. Ciò significa che la mappa che utilizza per la localizzazione dei veicoli si basa sulle caratteristiche piuttosto che sulla mappa basata sulla griglia di corrispondenza della scansione: le caratteristiche vengono confrontate con le caratteristiche, piuttosto che i punti laser sui punti laser.
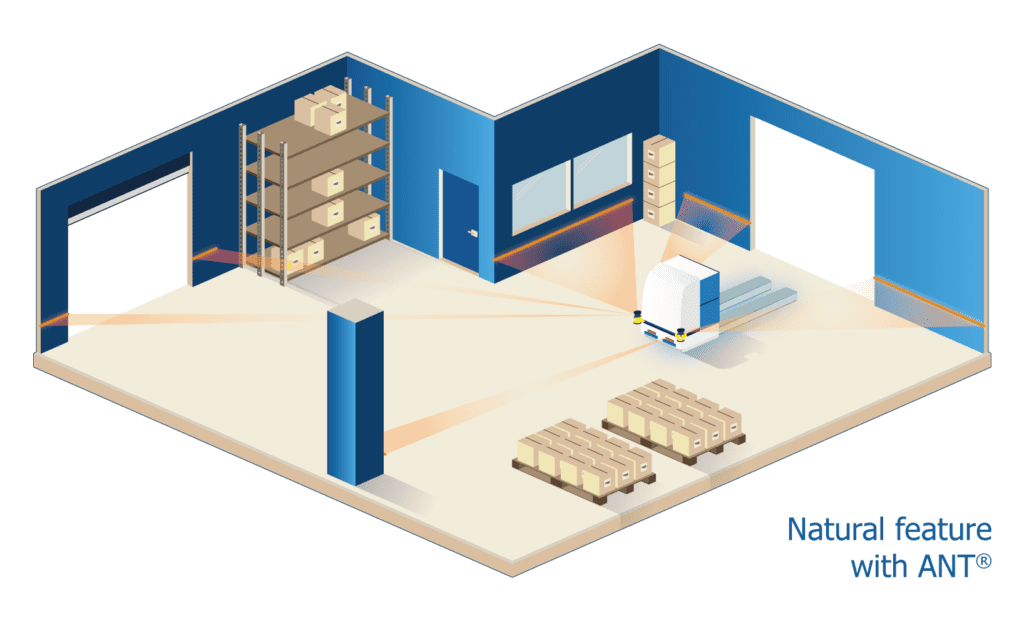
Simile ad altre soluzioni di funzionalità naturali, ANT è semplice e veloce da installare, con modifiche minime all’infrastruttura richieste. Poiché i percorsi sono virtuali, anche la manutenzione e la modifica dei percorsi è rapida ed economica. In generale, ANT offre un’accuratezza e un’affidabilità simili alle consolidate tecnologie di triangolazione laser.
Dati i 20 anni di esperienza di BlueBotics nel mercato degli AGV industriali, a differenza di altre offerte di funzionalità naturali, ANT è un prodotto notevolmente più maturo. Inoltre, poiché le mappe ANT sono basate su funzionalità e non su griglia, sono eccezionalmente leggere in termini di dimensioni del file e quindi più semplici da gestire per le aziende.
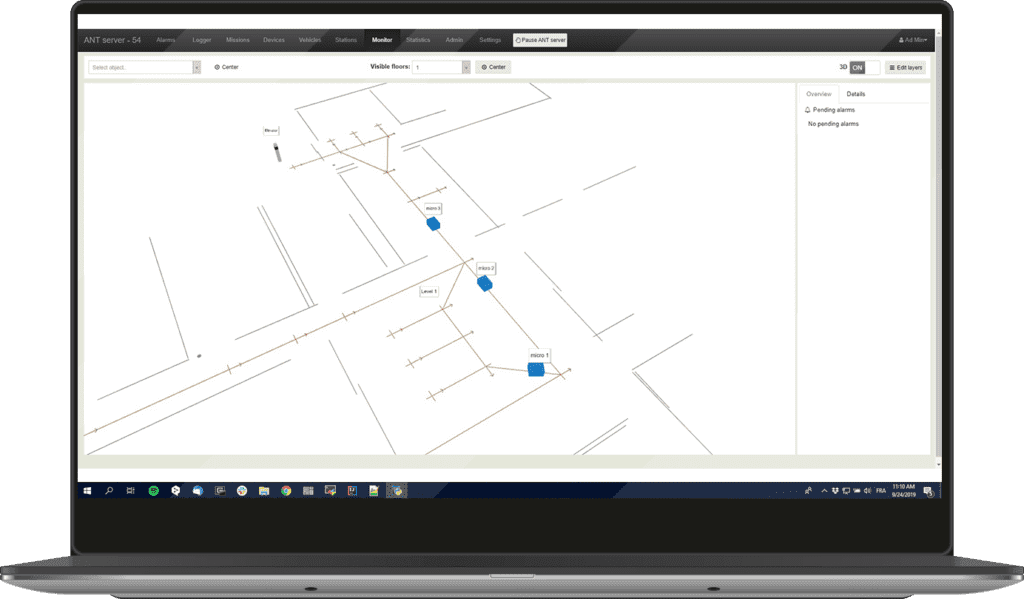
Quando si tratta di installare e gestire flotte di AGV, il software di gestione della flotta di server ANT di BlueBotics semplifica la creazione e la gestione delle missioni dei veicoli, inclusa la gestione del traffico.
Unicamente, il server ANT è anche indipendente dal veicolo, il che significa che diversi tipi (e persino marche) di veicoli basati su ANT possono lavorare insieme senza problemi, ampliando la scelta dell’utente.
Caratteristiche naturali di navigazione con ANT: punti di forza e punti di debolezza

In sintesi, la navigazione ANT offre tempi di installazione più brevi e costi di infrastruttura inferiori rispetto alla maggior parte dei metodi di navigazione AGV. È anche preciso, affidabile e offre una gestione avanzata della flotta attraverso il suo software server ANT opzionale.
Confronto delle tecnologie di navigazione AGV

Rispetto agli altri metodi di navigazione AGV discussi in questo e nel precedente post di questa serie, la tecnologia di navigazione con caratteristiche naturali supera gli altri sistemi di guida.
ANT si inserisce approssimativamente tra la triangolazione laser e la navigazione naturale basata sulla scansione nel mercato, offrendo ai produttori di veicoli e agli utenti finali di AGV il meglio di entrambi i mondi: la velocità e la flessibilità della navigazione delle caratteristiche naturali con la maturità e la funzionalità simili alla triangolazione di una soluzione che è sul mercato da anni.
Guarda: webinar di navigazione AGV
Per ascoltare gli esperti di BlueBotics confrontare i diversi metodi di navigazione AGV odierni, non perdere questo webinar esclusivo.
_integrated_into_the_vehicle")
Cominciamo
Fai il primo passo verso l’automatizzazione del tuo veicolo.
Entra in contatto con il nostro team di esperti oggi stesso.