AGV Navigation Methods 1: Line Following and Tags
When developing or upgrading an automated guided vehicle (AGV) or mobile robot, investing in the right autonomous navigation technology is key. In this exclusive two-part guide we explore the different AGV navigation methods available, starting here with physical line following technologies.
Choosing the wrong AGV navigation method can have a dramatic effect on the cost, efficiency and therefore success of the automated solution you produce. This is true both at the development stage, when integrating navigation technology into your vehicle and, in future, when your vehicle is on the market and you come to install that vehicle at customer sites.
In this exclusive two-part series, we will discuss the different AGV navigation options to help you make the best choice.
AGV navigation methods: physical or virtual
As this guide will explain, there are numerous AGV navigation methods available. However, these can be broadly divided into two categories:
- Navigation technologies that guide vehicles along physical lines (a.k.a. line following). These lines could take the form of magnetic tape, painted lines, inductive wire or (less often these days) rails. We can also include tags in this category for simplicity.
- Navigation technologies that guide vehicles along virtual (i.e. digital) paths, which exist only in the vehicle’s software.
This article focuses on the first category of technology: physical line and tag following technologies.
In this post | Navigate to a section
Line following navigation
With line following navigation technologies, AGVs are literally guided through a facility by a physical line, such as magnetic tape, inductive wire (installed in/under the floor) or painted lines.
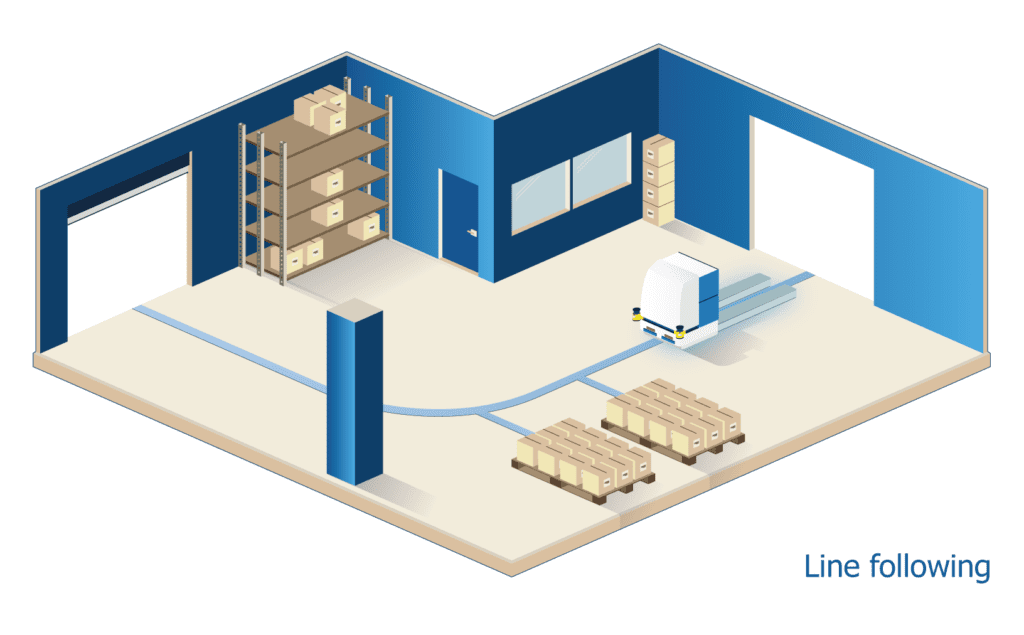
This approach works in the following way: the vehicle features a sensor that ‘looks’ down at the line on the floor. Then, it measures the left and right error, and uses this information to correct the vehicle’s trajectory.
This simple AGV navigation method is ideal for applications in which a vehicle moves continually around a loop. A common example is automotive manufacturing, where mobile robots move parts from station to station.
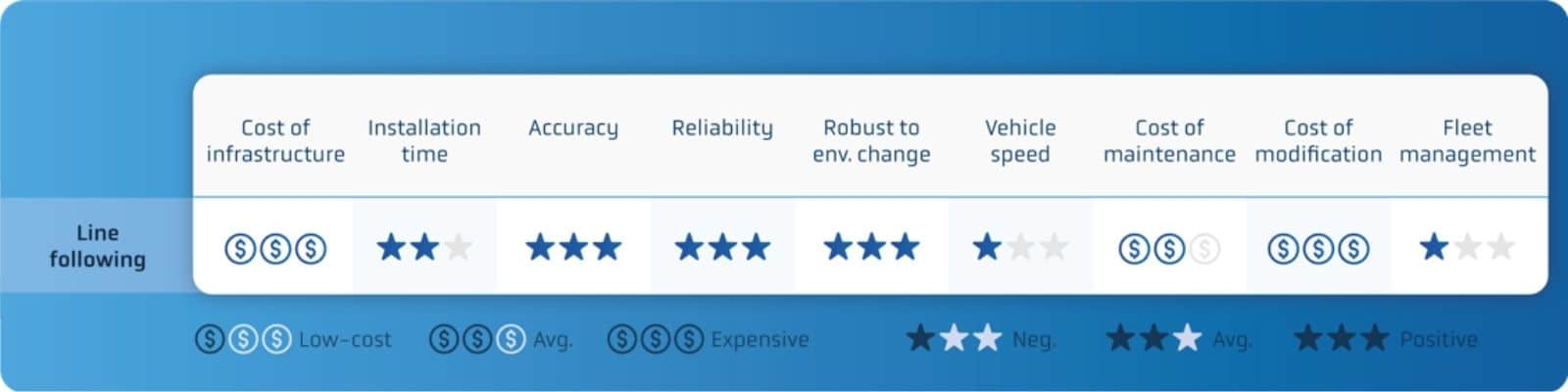
On the plus side then, line following is simple, exceptionally reliable, accurate and stable. However, it does have its drawbacks.
- Firstly, it takes time to layout and, in future, modify routes. This is especially true in the case of inductive wire, which is literally installed in the floor itself.
- Managing a fleet of line-following vehicles can be difficult if not impossible, especially when several lines need to cross each other. Traffic management can also be extremely difficult for complex installations.
- The lines themselves can also require maintenance. Magnetic tape, for example, can get ripped up over time.
Related: “I’ve heard horror stories about trying to keep up the maintenance on magnetic tape.”
Line following: strengths and weaknesses
Tag following navigation
Tag following works in much the same way as the following of physical lines. However, in this case AGVs are guided through a facility by tags such as QR codes, RFID tags or magnetic points embedded in the floor.
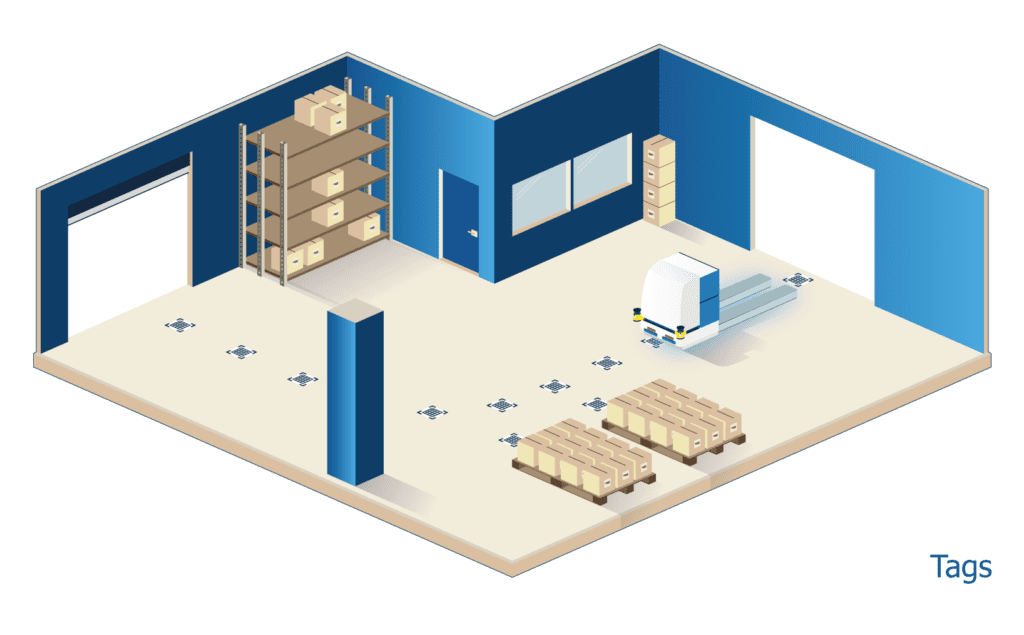
Whatever the type of tag, the vehicle is equipped with a specific sensor to follow the route defined by these tags – in that sense this approach is just like line following. Tag following is the reference in e-commerce, where simple path layouts are the norm.
The pros and cons of tag navigation are therefore very similar to those of line following technologies: tags take time to physically install (and modify in future), and maintenance will be required over time, however, tags are exceptionally reliable and robust in operation.
Tag following: strengths and weaknesses

Line following vs. tag following
By directly comparing line following and tag following AGV navigation methods, we can see that these approaches have very similar strengths and weaknesses. Line-following vehicles tend to edge slightly ahead in terms of their positioning accuracy (for example when picking, dropping, and docking to recharge), however, they often travel slower than tag-following AGVs.

Read part 2 to explore virtual AGV navigation methods.
Watch: AGV navigation webinar
To hear BlueBotics’ experts compare today’s different autonomous navigation technologies, watch our exclusive webinar.
Let's get Started
Take the first step to automating your vehicle.
Schedule a call with our expert team today.