Skip to content
Skip to contentAutomation ROI: Using Nipper AGVs to meet resource optimization goals
GECOM’S Steven Lockhart had a challenge: increase efficiency while optimizing human resources. As the head of the Corporation’s Continuous Improvement team, Lockhart had seen automated guided vehicles (AGVs) in action at other GECOM sites. In 2018 he embarked on an AGV adoption program at his own production site in Greensburg, Indiana.
Optimizing material handling inefficiencies
The team were given a headcount goal to meet, and could clearly see a number of inefficiencies where workhours were being spent without adding any value.
A lot of time and human resources were being used walking the shopfloor, eyeballing the different lines. “We had material handlers with pallet jacks walking around trying to figure out what they needed, when they needed it,” says Lockhart.
Material handling associates were responsible for:
- Moving empty tubs (boxes) and raw materials from the warehouse to one of the plant’s 65 assembly lines
- And returning full tubs of finished products
The manual process meant that pedestrian and lift truck on the floor was higher than it needed to be, at odds with GECOM’s safety-first policy. “We never had a good time study to tell us if we had the right number of people or not. So, we knew we had some good opportunities to optimize our processes,” concludes Lockhart.
Project details: Automating an automotive plant
| Customer | GECOM Corporation |
| Industry | Automotive |
| Location | Greensburg, Indiana (USA) |
| Employees | 630 |
| AGVs | 5x forked AGV “Nipper” by Nipper |
| Navigation | BlueBotics ANT lite+ |
| Software | BlueBotics ANT server Ignition SCADA software by Inductive Automation |
| Expected automation ROI | 2 years |
Moving towards automation
GECOM’s first step towards automation was manual.
Rather than jumping from a completely manual to completely automated site, Lockhart and the team first deployed manually-driven tugger (towing tractor) vehicles. The small motorized trucks were driven by material handlers, pulling carts full of tub skids.
“Our thought was that we could implement the tuggers and then transition from the tuggers to AGVs. Implementing the tuggers first would allow us to establish the routes and the pick and drop points, which would be one less challenge once we started with the AGVs,” Lockhart explains.
The tuggers completed three tasks:
- Bringing raw components to the assembly lines
- Bringing skids of empty tubs to these lines to collect the finished goods
- Taking full skids of finished goods from the lines back to the warehouse
It was a relatively small step, but Lockhart comments: “We were already able to achieve some headcount optimization by running one tugger, pulling five carts at a time.”
Making space: finding a compact AGV
As is the case on most shop floors, the team at GECOM were dealing with limited space. And an issue that quickly became apparent during the analysis phase of the automation project was the height of the skids on the tugger carts themselves.
“Our carts are 18 inches off the ground. Then, from the bottom of the skid to the top layer of tubs, that’s another 50 inches, a total of 68 inches high,” Lockhart says. “That meant the top tub was physically too high for our associates to stack.”
Because the top tub couldn’t easily be manually unloaded, Lockhart was already sure a tugger system, whether manual or AGV, wouldn’t work for moving skids of tubs between lines and warehouse.
There was also another reason why these vehicles came up short: their size.
“Our assembly floor is pretty tight; there’s just not a lot of free room,” Lockhart says. “In theory the tugger driver could have done it, but we knew that wouldn’t be possible if we were using AGVs and we were trying to eliminate all human interaction. For these reasons, we concluded that using larger AGVs such as tuggers wasn’t going be feasible.”
With size in mind, Lockhart began to research smaller, more agile AGVs that could transport skids (pallets) full of tubs. “I was immediately able to narrow down a lot of AGVs because our aisles are only 96 inches [244 cm] wide,” he says. “That proved to be the biggest challenge—finding an AGV that can operate in an eight-foot aisle.”
“Our assembly floor is pretty tight. There’s not a lot of free room. So, we realized that using larger AGVs wasn’t going be feasible.”
His team, working with one of GECOM’s existing integrators, ran several demos of a well-known brand of autonomous mobile robot (AMR) first. These AMRs had hooks at the back, tugger-style, which Lockhart imagined could pull flat deck carts loaded with GECOM skids. “But, when we analyzed the safety of those robots, backing up with no scanner at the back, and we saw the amount of time needed to hook and unhook the AGV to the carts, we decided to look elsewhere,” he recalls. “As soon as I saw the Nipper though, I thought, ‘That’s it!’”
Watch Nipper’s Nipper AGVs in action at GECOM Corporation.
In addition to being compact and agile, the Nipper AGV from Nipper also offers between four and five hours of run time for a 30-minute charge, and an impressive maximum load of up to 2,200 lb. (1,000 kg). And because the Nipper is guided by ANT from BlueBotics, Lockhart’s team had minimal infrastructure changes to make on-site, just adding a few adhesive reflectors.
“I knew I didn’t want a system that follows magnetic tape, as I’ve heard horror stories about trying to keep up the maintenance on that. The Nipper just runs off data from a 360-degree navigation scanner and uses Wi-Fi to communicate,” Lockhart explains.
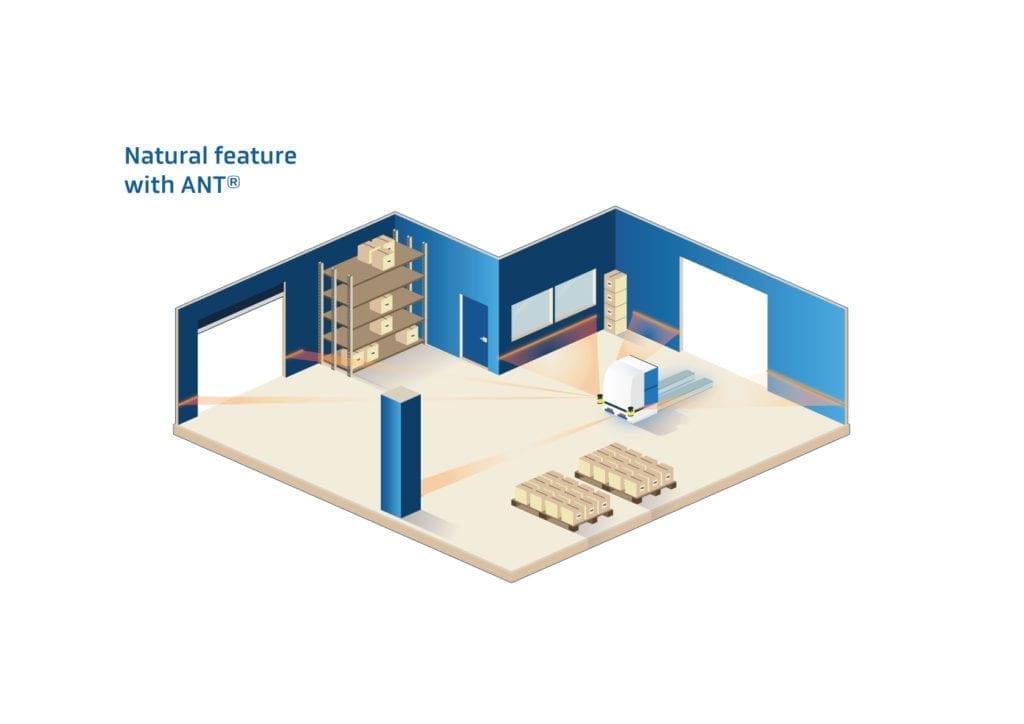
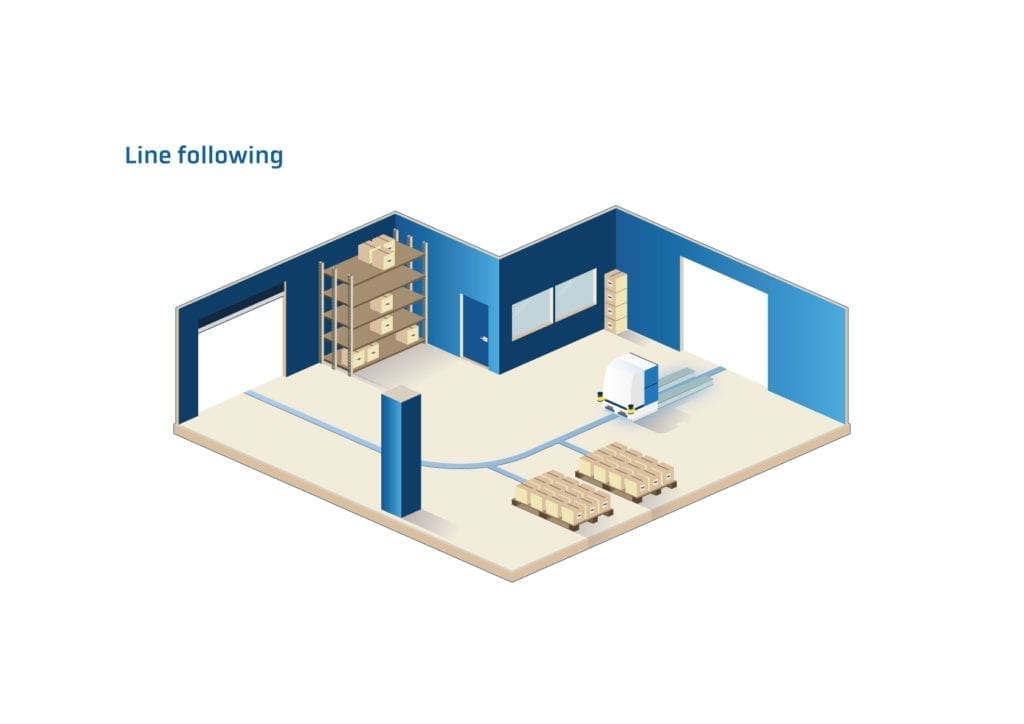
ANT natural feature navigation by BlueBotics is quicker and less expensive to install and maintain than physical line following technologies. Learn more by watching our Comparing Navigation Technologies webinar.
Doubling down on proof of concept
Convinced that the Nipper could help meet their automation challenge, GECOM purchased two vehicles to prove the concept.
“With two I could work out how many we’d need in total to achieve our optimization goals, by calculating our timings, routes and everything. Plus, we could verify how they interacted with each other, at intersections for example and in the systems’ software,” Lockhart says.

Before the vehicles arrived on site, Lockhart and the team had already worked out how they would run. “One of the things that really helped was using the Nipper’s ANT lab software to run a simulation before we had the AGVs on-site. So, we did a lot of work before they showed up. We had our spots on the floor, our pick and drop points, all done.”
A second software package, ANT server, was used to manage the fleet of two—and later more—Nippers. However, Lockhart’s team also made use of the ANT software’s API to add an additional, more expansive interface on top of ANT server to make life even simpler for team leaders.
He explains: “We have 13 team leaders on first shift. They call the missions for the AGVs. They know what tubs they need to run that day and they know when their finished goods are done.
“We implemented tablets for these team leaders, instead of their desktop computers, partly to make them more mobile. We can also use the tablets to do other things on the line that team leaders need to do, like running lot control—scanning parts when these come into the line—so we know what batch of parts was used on what day. There are different things like that, which help the team leaders become more efficient.”
When implementing these tablets, GECOM chose Ignition by Inductive Automation, a SCADA program that was connected to ANT server’s API.
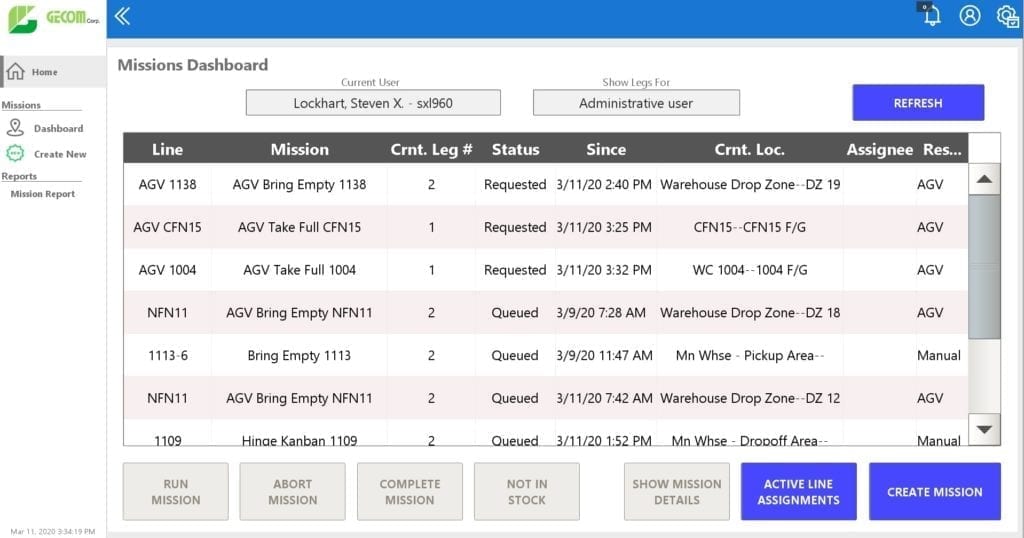
“We had a local company program Ignition and we made a user interface for it, like an HMI. With this I could set-up a team leader to only have access to their lines, which saved them from having to scroll through a long list of lines every time they needed to call a mission. Our end goal was that when he or she hits Start Mission, that mission would go into the ANT server and generate the mission for the AGV,” Lockhart adds.
The human to AGV transition
To smooth the transition to AGVs further, in the beginning Lockhart also supplied the tablets to material handlers.
In effect, these staff were able to act as stand-in AGVs.
“They would also be running the same app as the team leaders, so they could see the missions the team leaders were calling for,” Lockhart explains.
“That way, we had the team leaders using Ignition software to generate the missions and the material handlers could see what they had coming or what they needed. Once the material handlers had completed those missions, they would just close them out on the tablet.”
When the AGVs did arrive then, Lockhart continues, “We were able to slide the material handler tablet out and slide the AGV in place. We weren’t trying to put in two new pieces at once.”
Commissioning the first two Nippers in April 2019 took around two weeks. Nippers three and four were then installed in September 2019, followed by Nipper five in March 2020.
Commissioning times for the later AGVs were quicker, Lockhart adds. “With AGVs three to five, we knew what we wanted to set-up beforehand and we were able to make all of our lines for the AGVs interact with the API. So, we did a lot of that set-up before AGVs three to five got here.

This made for a much smoother transition.” However, GECOM’s AGV deployments didn’t come without their challenges.
“No-one has had AGVs here before, not associates or team leaders. So, one thing was just getting them accustomed to these vehicles, getting them to understand how they work. For example, everybody kept walking through the fields of the Nippers’ safety scanners, so we had to carefully explain how these scanners worked so that this didn’t happen,” Lockhart says.
Reducing resources by 73% and achieving automation ROI
Today at GECOM Corporation’s site, five Nippers run 24 hours a day, five days a week, covering 65 assembly lines. And GECOM’s team is satisfied with its investment. “It’s definitely been a successful project,” Lockhart says.
“We’ve been able to meet our target headcount reduction, of approximately 73%, and it’s also led the way for us to explore other AGV possibilities.”
In terms of calculating breakeven on the company’s AGVs investment, Lockhart reminds us that the project included more than just the Nippers themselves. “The whole project included the tablets, the AGVs, and the Ignition software. We looked at all that as a whole and calculated how many material handlers could be saved over all three shifts and then calculated an ROI based off of that. That’s what we initially presented to management and that’s how we got the go ahead to move forward.”
Continuous Improvement team projects usually aim to breakeven within a year. However, with the AGVs this figure was extended to 24 months. “We were okay with that, as we knew that no matter what customer it was or what assembly line we had running, this AGV deployment was more a general project that would cover pretty much anything we put on the production floor,” Lockhart says.
Key to the success of company’s AGV deployment, he adds, has been not only its choice of the Nipper, but the support offered by the vehicle’s producer, Nipper. “Ever since I started talking with Nipper, their support has been phenomenal,” he states. “They’ve always come back with answers to my questions and they’ve always been very responsive.”
What’s next?
The next step for Lockhart and his team? Expanding their AGV program.
This could mean procuring a high reach truck, also based on ANT navigation technology, to run in a fleet alongside the Nippers. Plus, Lockhart is considering replacing the manual tuggers used to bring raw components to the assembly lines with AGVs too.
Download this story as a PDF, or find out more about navigation options from BlueBotics.
Let's get Started
Take the first step to automating your vehicle.
Schedule a call with our expert team today.