
自主导航技术 (ANT)
AGV、自动叉车或移动机器人的自然特征导航
您的车辆,
我们来导航
ANT导航技术是一个精确、可靠和灵活的解决方案,可满足不同车辆生产商和运营商不断变化的需求。奠基于22年的丰富行业经验,ANT易于使用,无论安装和修改皆符合成本效益。所有的BlueBotics产品 都有FCC和CE认证。

快速
安装和修改

精确度
达到±1 cm / ±1°

可扩展
创建ANT驱动车队
这些 AGV 配备特定的传感器,可跟随地面的物理线(例如磁带、电感线)。
优点
缺点
这些车辆配备特定的传感器(例如摄像头或代码读取器),该传感器遵循由标签定义的路线。
优点
缺点
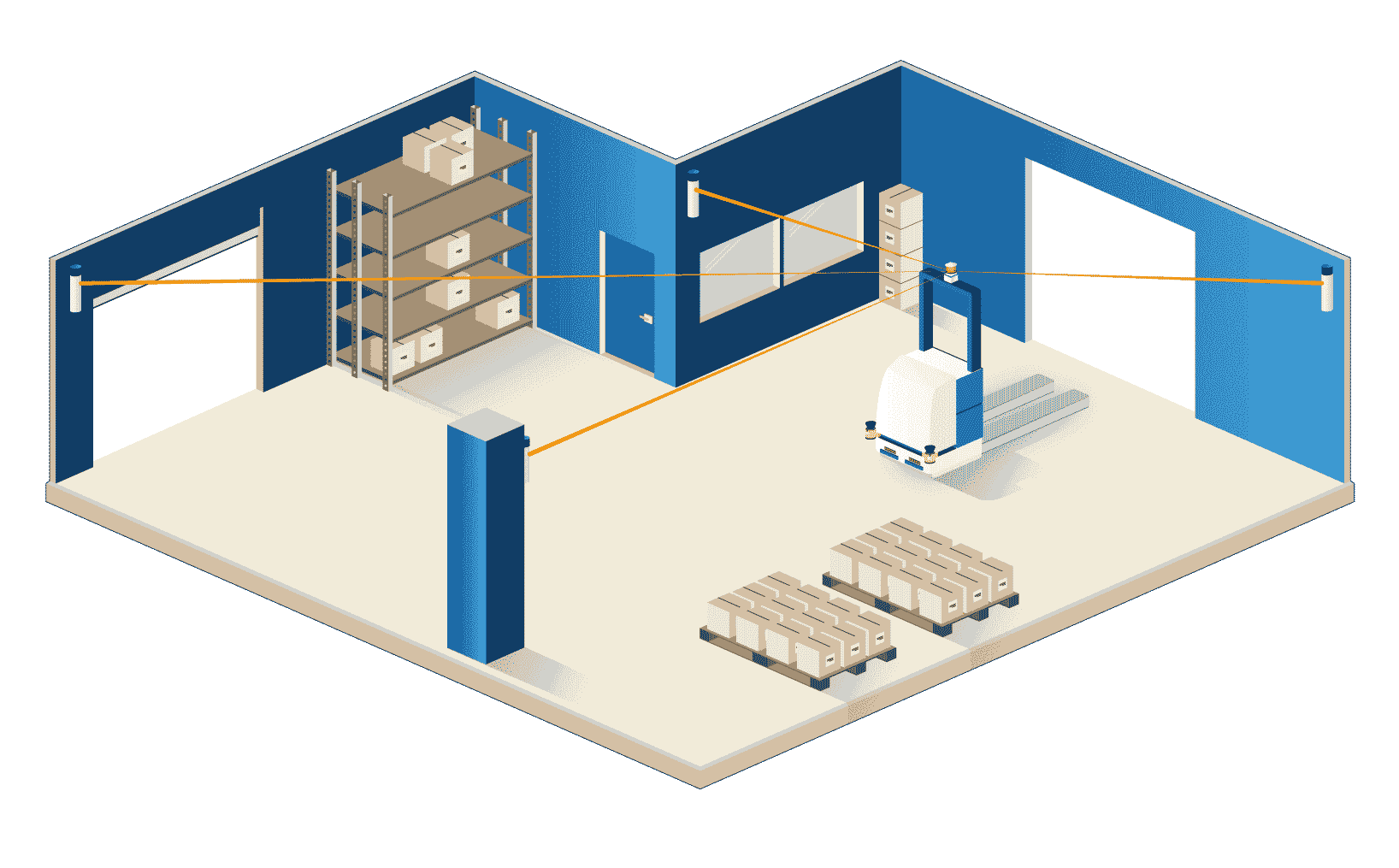
使用从反射器反射回来的激光束对车辆的位置进行三角化定位。遵循的路径是虚拟的。
优点
缺点
使用摄像机识别环境中的特征,并据此计算车辆的位置。遵循的路径是虚拟的。
优点
缺点
使用车辆的激光扫描仪测量的点来识别环境中的结构,然后匹配。遵循的路径是虚拟的。也叫:SLAM导航,自然导航。
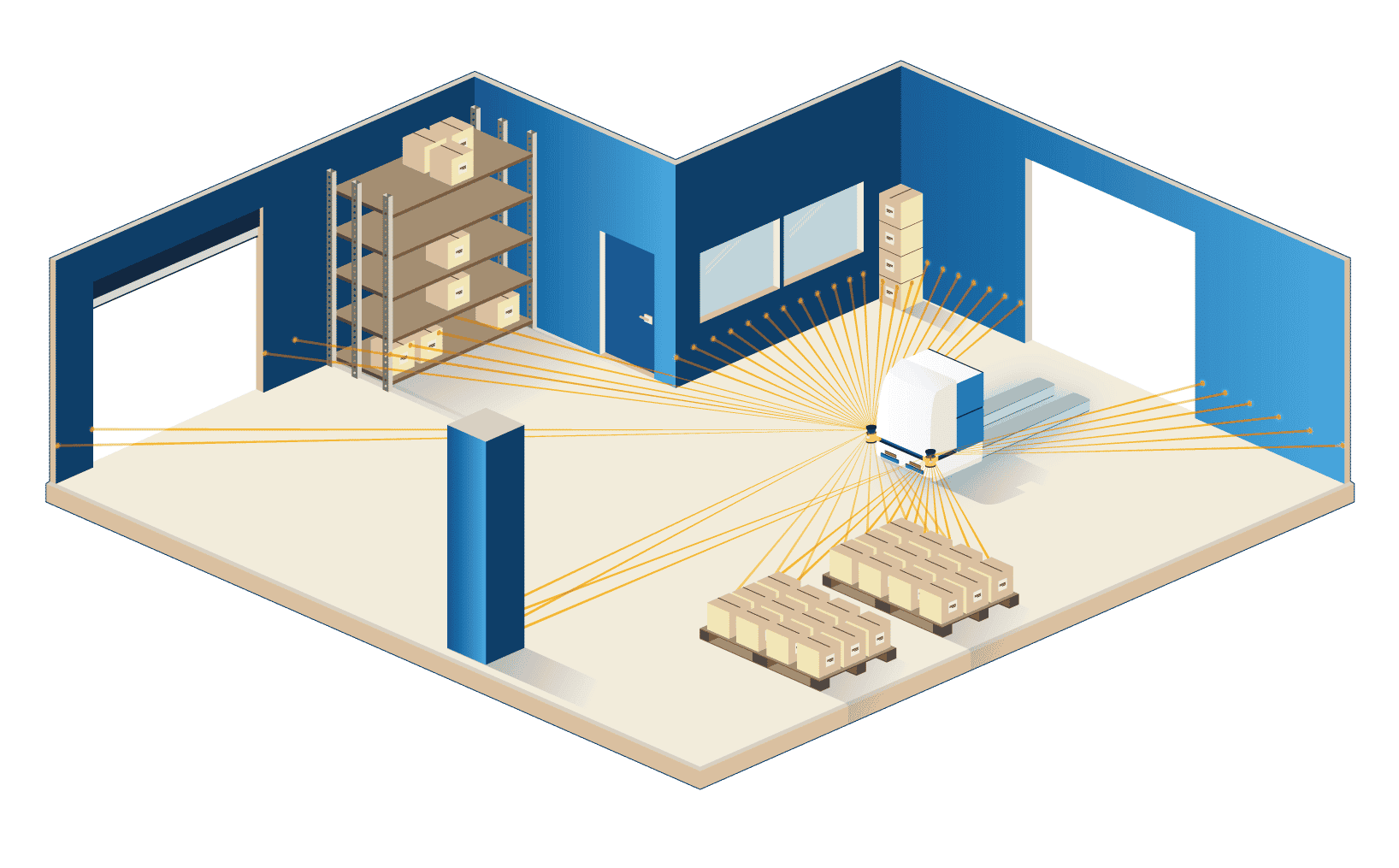
优点
缺点
使用车辆的激光扫描仪测量的点来识别环境中的结构,然后匹配。遵循的路径是虚拟的。也叫:SLAM导航,自然导航。
优点
ANT导航技术如何运作?
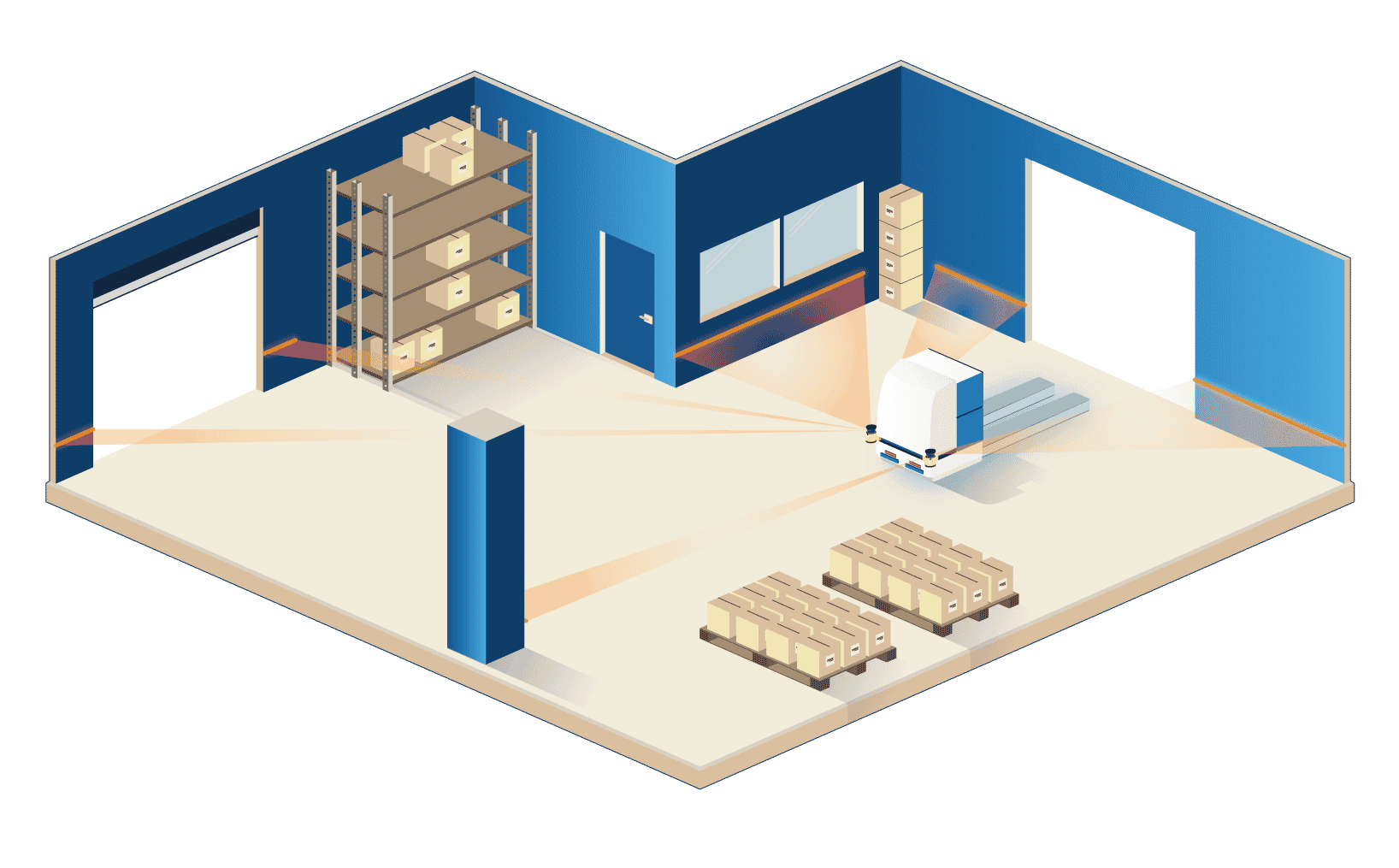
ANT自然特征导航(有时称为"自然导航"或"SLAM导航")使用车辆现有的激光安全扫描仪,首先识别并匹配环境中的永久性特征,例如:墙壁、柱子和机器。
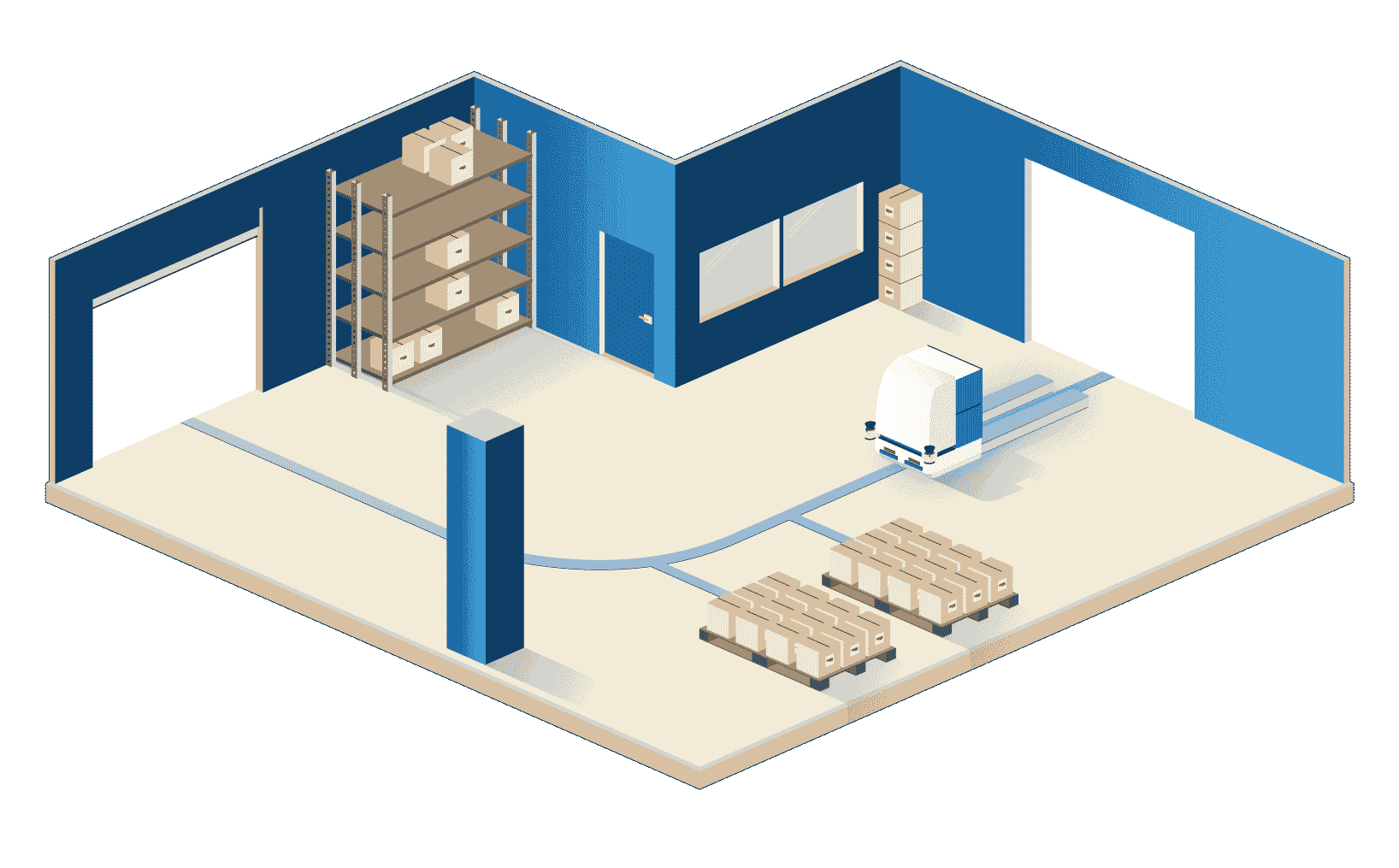
1. 创建地图
在站点周围手动驾驶您的 AGV。我们的 ANT lab软件(含带中)记录了来自车辆安全激光扫描仪的数据,用于生成 2D 地图。然后,通过移除任何动态对象来"清理"此地图,只留下永久要素,如墙壁和柱子。这些参考数据将用于计算车辆的位置,使其能够有效地导航。

lab_software-step2-define-your-operation")
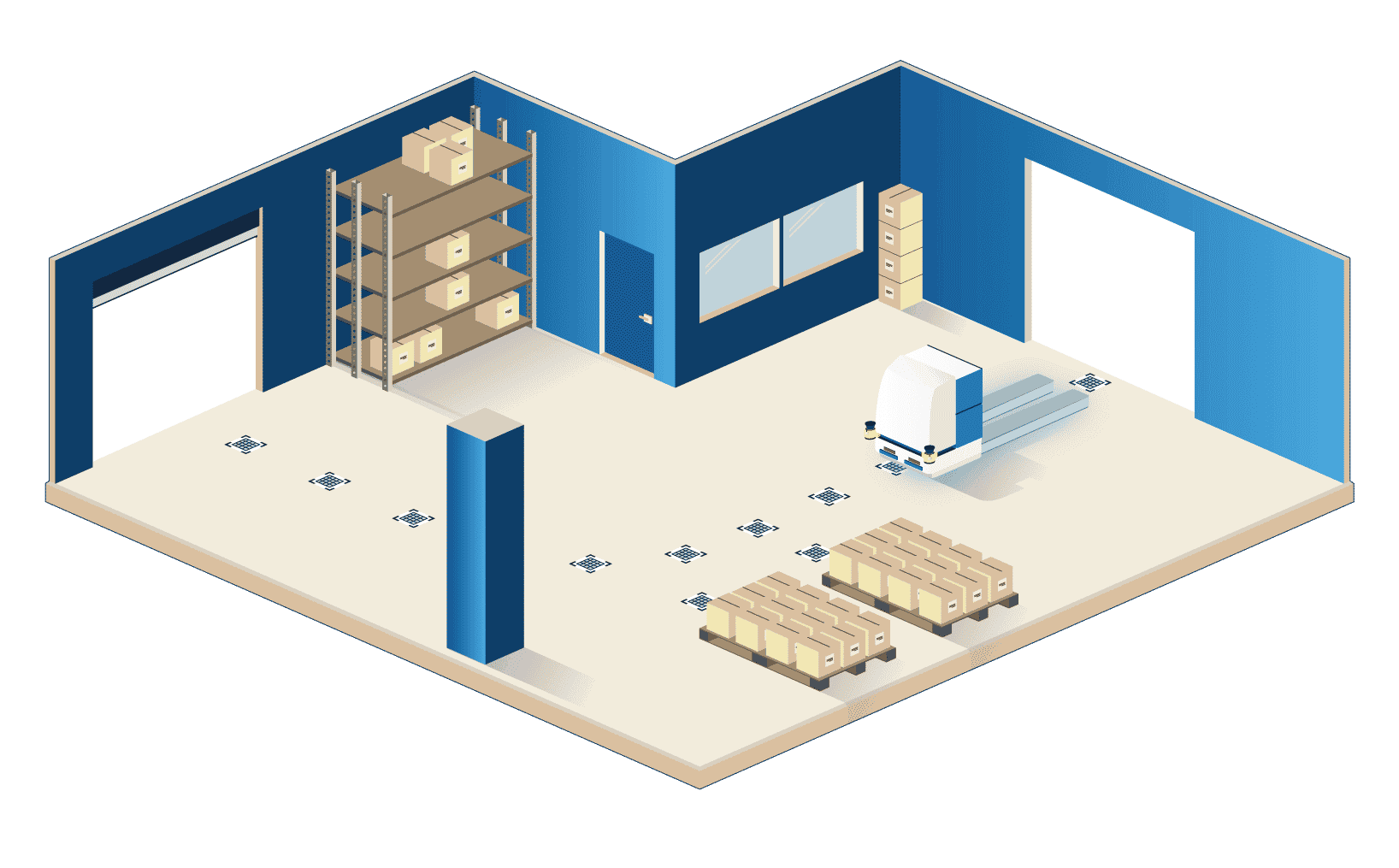
2. 定义任务
对 AGV 所需的路线进行编程。然后,添加任务,如移动叉车的叉子、设置数字 I/O 或与车辆的 PLC 通信。路经和任务在 ANT lab中进行配置。
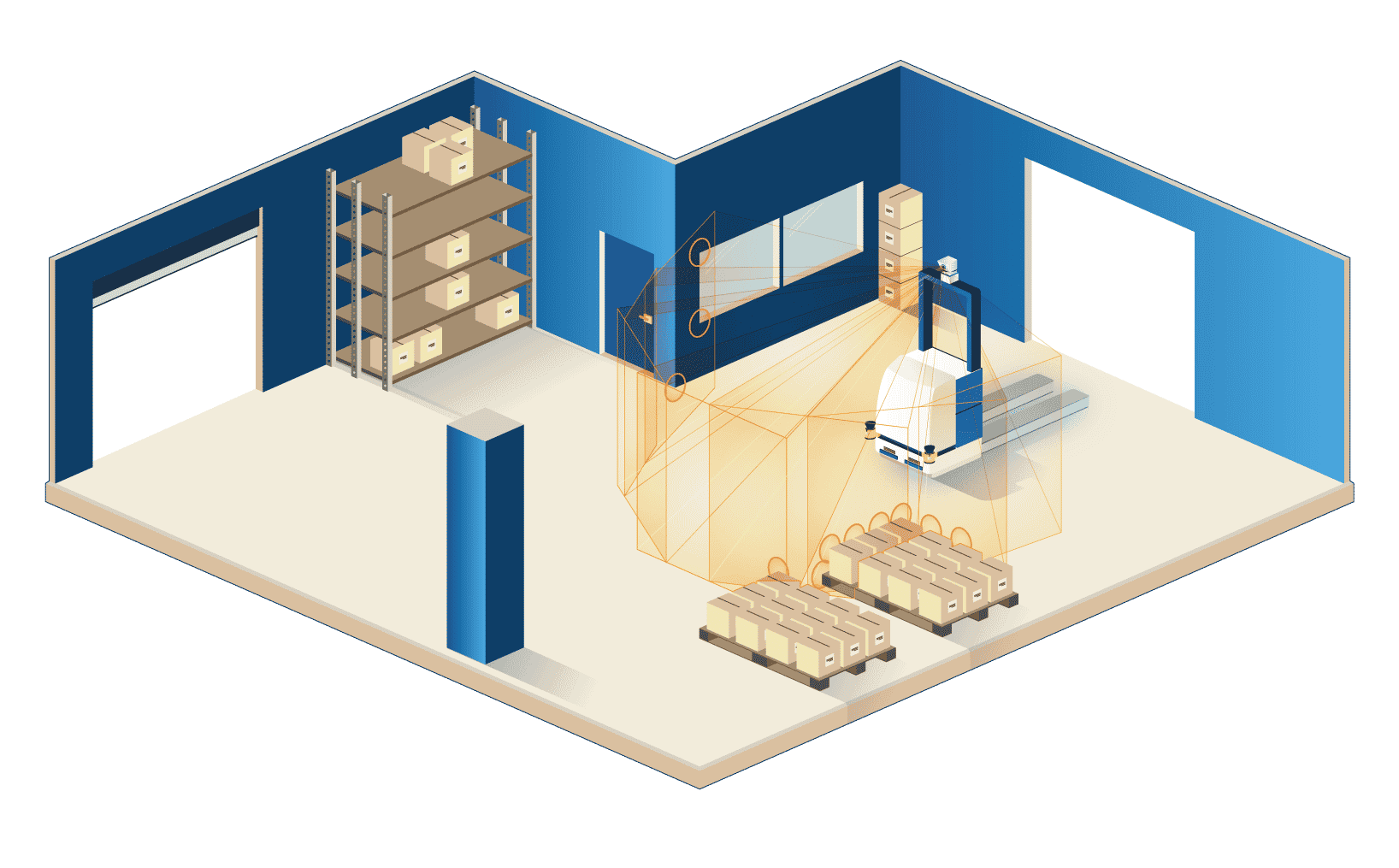
3. 开始工作
开始您的第一个任务!您的由 ANT® 驱动的车辆将使用安全扫描仪测得的数据与测程法相结合,按照预定义的路线和任务安全穿越工作环境。对于多辆 AGV,流量和车队管理很容易由我们的 ANT server软件(与 ANT lite+一起使用) 处理。
lab_software-step3-go-to-work")
ANT有哪些功能?
自主导航技术 (ANT) 包括各种功能,可自动化AGV、叉车或移动机器人。每个功能都旨在根据全球客户的需求带来实际价值。

强大完善的定位功能

最佳的车辆控制

支持完整的运动形式

优化的路径跟随

避障功能选项

叉车货叉控制

嵌入式任务控制
托盘式、4 腿式、铰接式和外部跟踪器

全面集成支持 (包括现场)

强大完善的定位功能

最佳的车辆控制

支持完整的运动形式

优化的路径跟随

避障功能选项

叉车货叉控制

嵌入式任务控制

托盘/机架/推车跟踪

完整的集成支持(包含现场支持)
用于室外的GNSS选项
结合ANT server
使用的额外功能

车队管理

智能任务调度

交通管理

电池充电管理

设备接口

任务模拟

系统监控

API可与 WMS/MES/ERP连接

车队管理

智能任务调度
交通管理

电池充电管理
设备接口

任务模拟
系统监控
API可与 WMS/MES/ERP连接
经过一个星期的地图和装卸岗位的准备,我们开启了客户的车队,并在当天就能全面生产运行。我们有12辆AGV和6个装载位置,可运送至多达80个卸载位置。BlueBotics的ANT lab软件的性能和稳定性确实为我们节省了大量的调试时间。
Kurtis Schram
 Cimcorp北美公司应用程序开发人员
Cimcorp北美公司应用程序开发人员
“ANT很棒!但你们的服务让你们更加与众不同。你们总是非常及时地回应我的问题。这让你们脱颖而出。”
Miguel de Sebastian
DTA公司首席执行官
“BlueBotics公司的技术是自然特征导航技术软件中最强大的。它的潜力或可能达致的精准度让我们难以置信,直到我们亲眼见证。将 ANT集成到叉车中时,技术支持团队的专注性指导非常出色,简直是最棒的!”
Thanassis Papaleloudis
LIFTCO E.E.公司首席执行官
“"我们依靠BlueBotics非常有用和专业的工程支持,开发了一个自动化的解决方案,用于转移超重的部件。我们的AGV与我们的机械臂站携手合作,以较少的人力提供高效率的服务"。”
Francis Tan
Azimuth Technologies负责人
由专家提供集成和安装支持
当您选择ANT自然特征导航时,我们经验丰富的工程师团队将与您紧密合作,以确保将该技术成功集成到您的车辆中。
在此过程中,现场支持是我们提供的标准配备。我们甚至可以帮助您在第一个客户的站点安装车辆。同样地,您无需支付额外费用。
语言:
英语, 法语
语言:
英语,法语,德语,意大利语
语言:
英语, 法语
超过
23年 自然特征导航经验
自然特征导航经验超过5000辆
由ANT驱动的车型在运行中超过1000次
最终客户端安装超过10万
由ANT驱动行驶的公里数
产品搜寻器
我需要哪一款ANT产品?
要确定最适合您车辆的ANT导航系统,请使用产品搜索器或下面的比较表。或者请直接与我们的团队联系以讨论您的需求。
ANT产品比较
定位
控制
模拟路线跟随
任务管理
车队管理
室外操作

ANT lite+
 localization+")
ANT localization+
 localization")
ANT localization
我们来讨论一下您的自主导航需求
您对选择哪种导航技术有疑问吗?您想讨论一个特定的应用程序吗?或者,您是否想在屏幕上看到ANT的演示?点击以下链接与我们的专家团队联系。
