
Autonomous Navigation
Technology (ANT)
NAVIGATION SANS INFRASTRUCTURE POUR VOTRE AGV, VOTRE CHARIOT ÉLÉVATEUR AUTOMATISÉ OU VOTRE ROBOT MOBILE
Votre véhicule,
notre navigation
La technologie de navigation ANT est une solution précise, robuste et flexible qui répond aux besoins évolutifs des constructeurs de véhicules et des opérateurs. Basée sur 22 ans d'expérience dans l'industrie, la technologie ANT est simple à utiliser et économique à installer et à modifier. Tous les produits BlueBotics sont certifiés FCC/CE.

RAPIDE
À INSTALLER
& ET À MODIFIER

PRÉCIS
À
±1 cm / ±1°
 fleet")
ÉVOLUTIF
CRÉEZ
UNE FLOTTE
Ces AGV sont équipés d'un capteur spécifique capable de suivre une ligne physique au sol (par ex. : bande magnétique, fil inductif).
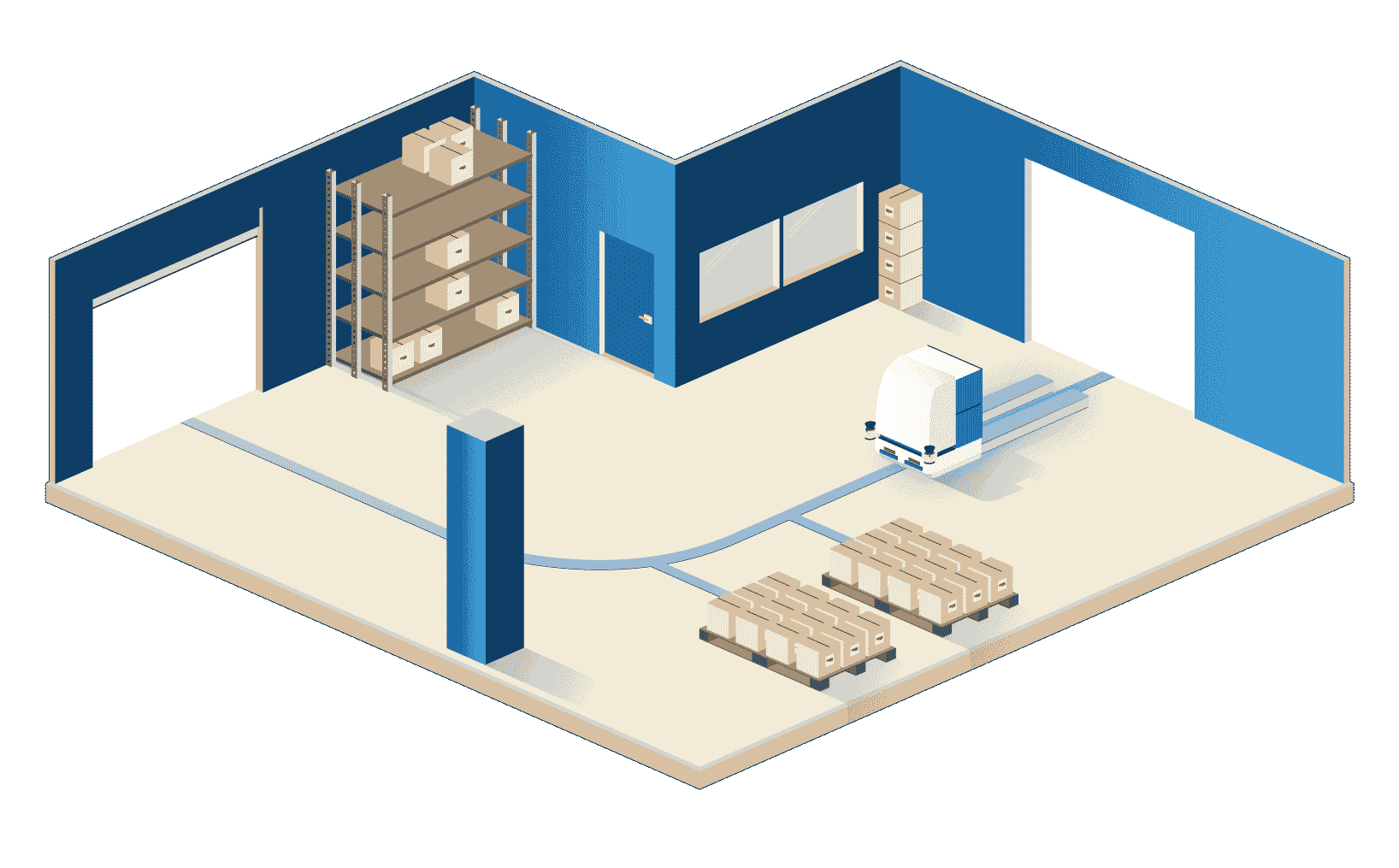
Avantages
Désavantages
Ces véhicules sont équipés d'un capteur spécifique (par ex. : une caméra ou un lecteur de code), qui suit un itinéraire défini par des tags.
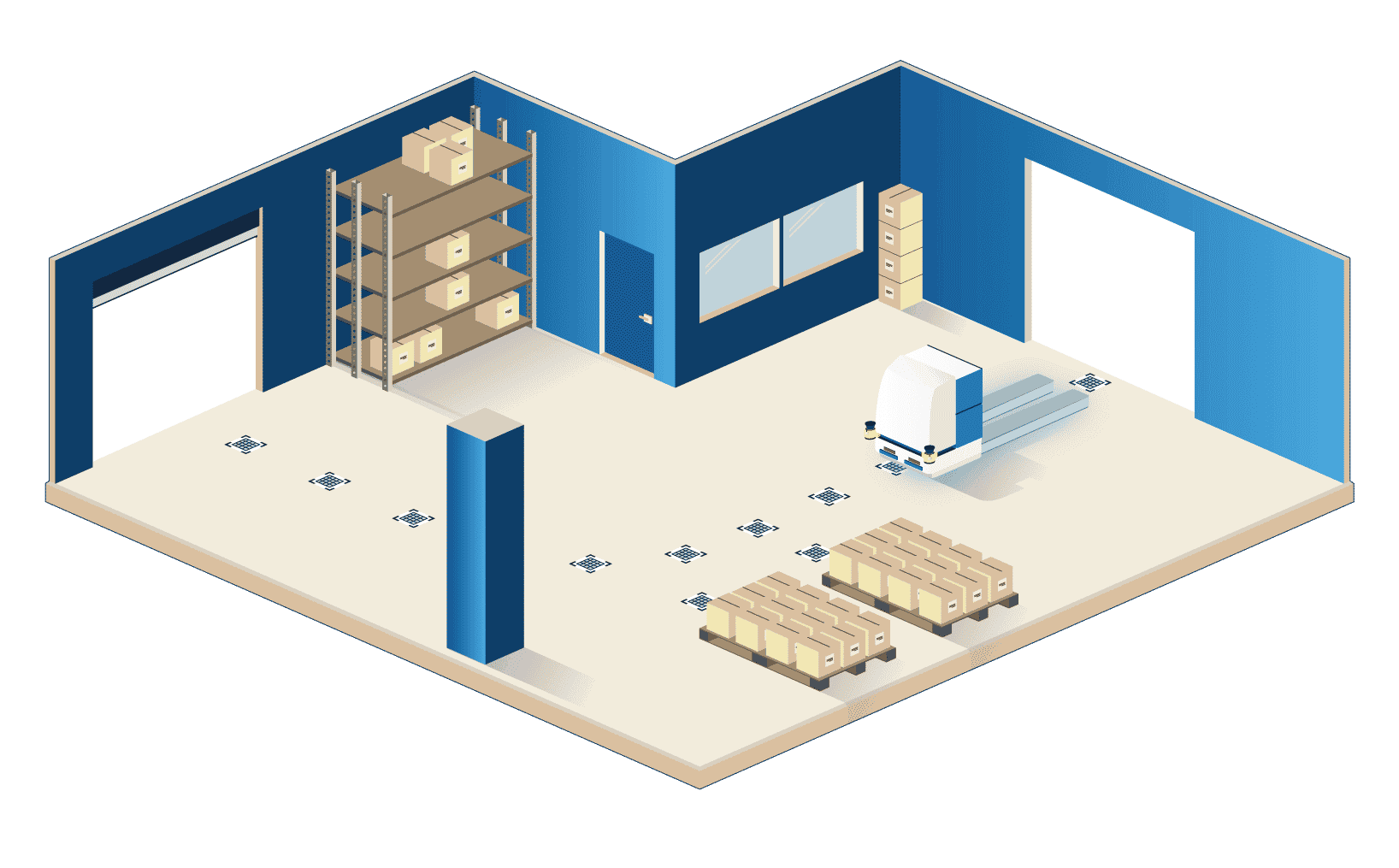
Avantages
Désavantages
La position du véhicule est triangulée à l'aide de faisceaux laser réfléchis par les réflecteurs. Les chemins suivis sont virtuels.
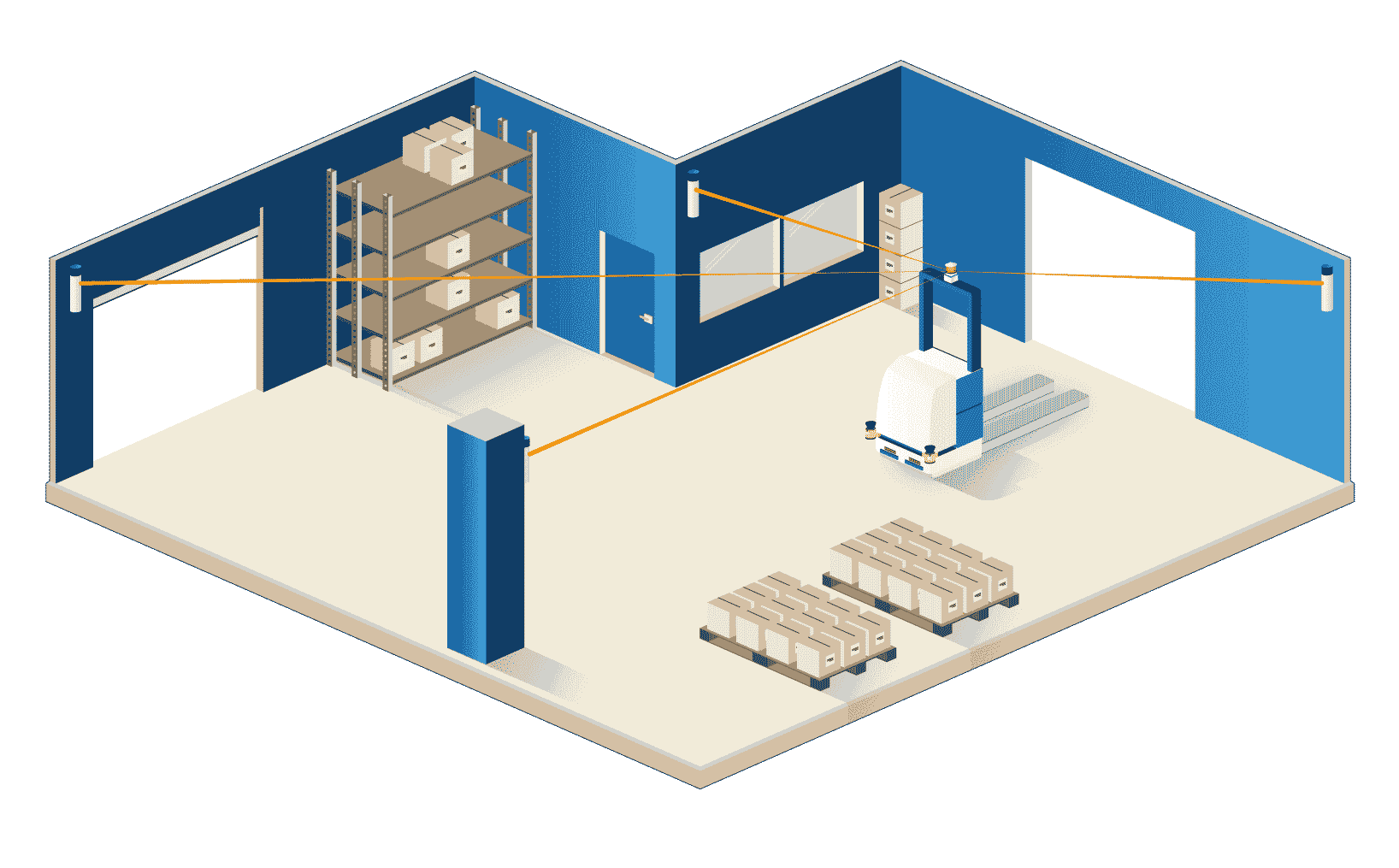
Avantages
Inconvénients
Utilise des caméras pour reconnaître les caractéristiques de l'environnement, à partir desquelles est calculée la position du véhicule. Les chemins suivis sont virtuels.
Avantages
Inconvénients
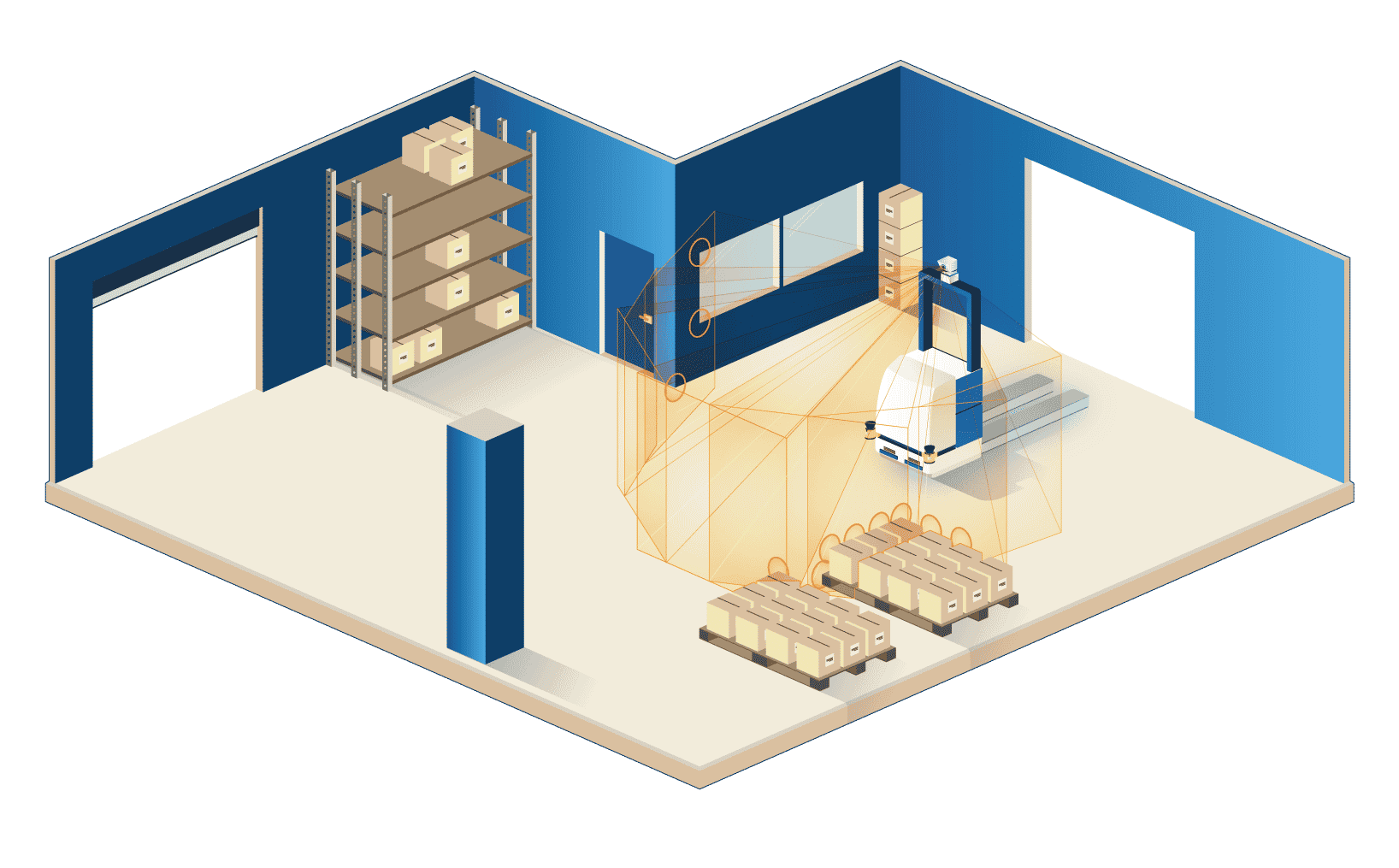
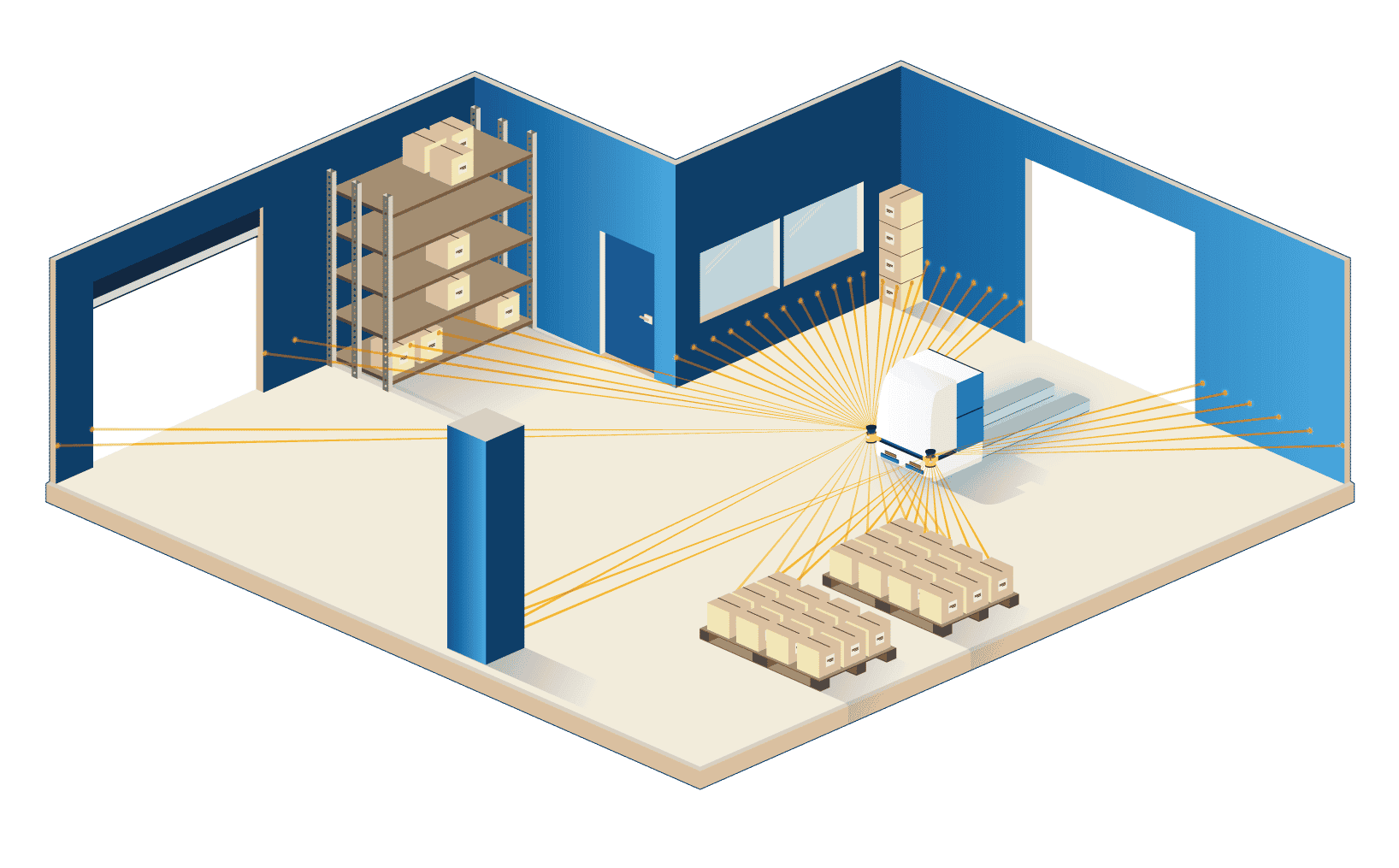
Utilise les points mesurés avec le ou les scanners laser d'un véhicule pour identifier - puis faire correspondre - les structures dans l'environnement. Les chemins suivis sont virtuels. Aussi appelée : navigation SLAM, navigation naturelle.
Avantages
Inconvénients
Utilise les segments mesurés avec un scanner laser pour identifier - et ensuite faire correspondre - les structures dans l'environnement. Les chemins suivis sont virtuels.
Avantages
COMMENT FONCTIONNE LA
NAVIGATION ANT ?
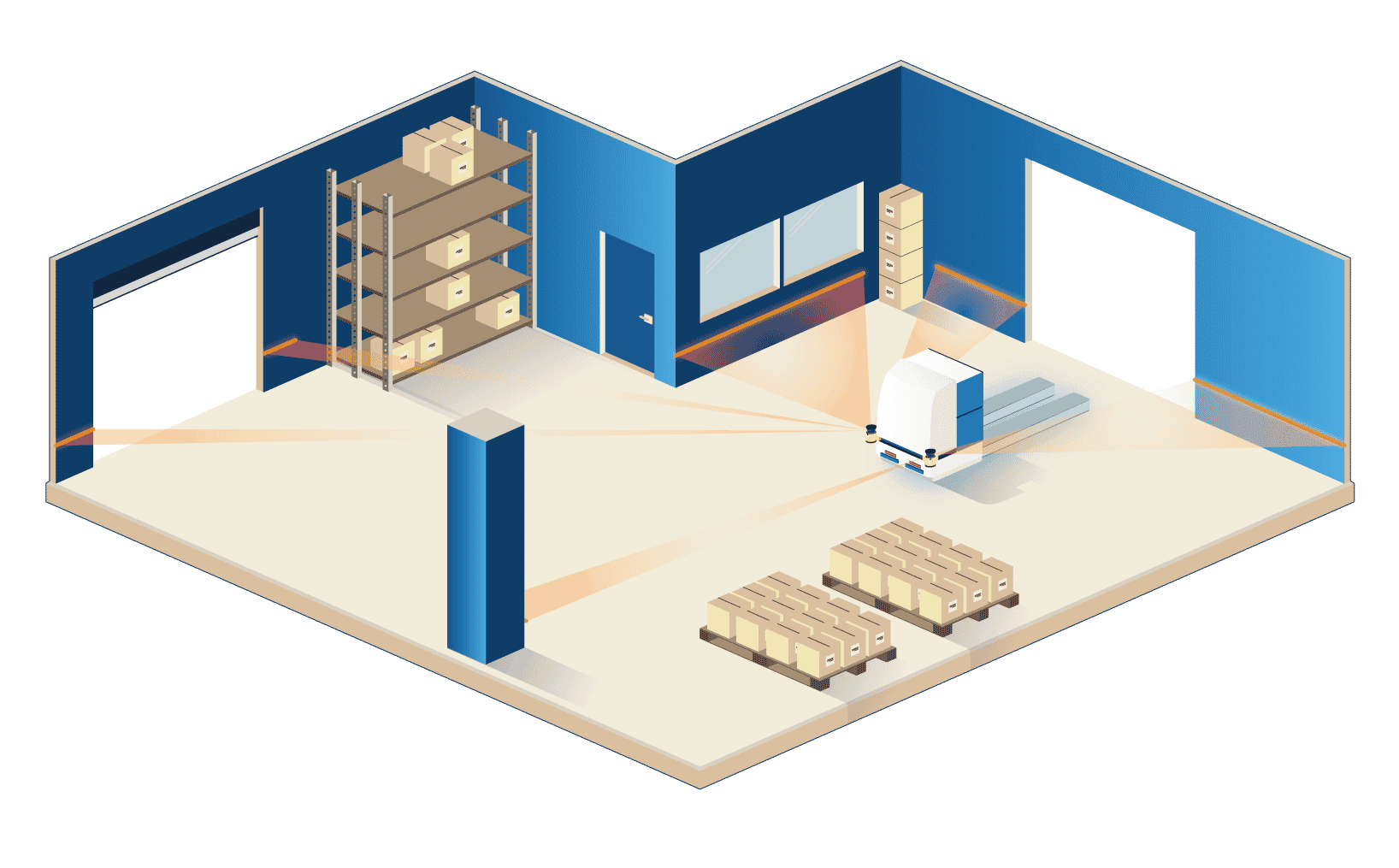
La navigation sans infrastructure ANT (parfois appelée « navigation naturelle » ou « navigation SLAM ») utilise les scanners laser de sécurité existants d'un véhicule pour identifier d'abord, puis faire correspondre ensuite, les éléments permanents de l'environnement tels que les murs, les piliers et les machines.
1. CRÉEZ VOTRE CARTE
Conduisez votre AGV manuellement dans l'environnement. Notre logiciel ANT lab (fourni) enregistre les données des scanners laser de sécurité du véhicule, qui sont ensuite utilisées pour générer une carte 2D. Vous n’avez plus qu’à « nettoyer » cette carte en enlevant tous les objets dynamiques, ne laissant que les éléments permanents tels que les murs et les piliers. Ces références seront utilisées pour calculer la position de votre véhicule et lui permettre de naviguer efficacement.

lab_software-step2-define-your-operation")
2. DÉFINISSEZ VOTRE OPÉRATION
Programmez les routes requises par votre AGV. Ajoutez ensuite des actions telles que le déplacement des fourches d'un chariot élévateur, la configuration d’une I/O numérique ou la communication avec l'API du véhicule. Les itinéraires et les actions sont configurés dans ANT lab.
3. AU TRAVAIL
Commencez votre première mission ! Votre véhicule piloté par la technologie ANT utilisera une combinaison de données de scanner de sécurité et d'odométrie pour se déplacer en toute sécurité dans l'environnement, en suivant vos itinéraires et actions prédéfinis. Dans le cas de plusieurs AGV, la gestion du trafic et de la flotte est facilement gérée par notre logiciel ANT server (disponible avec ANT lite+).
lab_software-step3-go-to-work")
FONCTIONNALITÉS INCLUSES
AVEC LA NAVIGATION ANT ?
La technologie de navigation autonome (ANT) comprend une large gamme de fonctionnalités pour automatiser votre AGV, votre chariot élévateur ou votre robot mobile. Chaque fonction a été conçue pour apporter une valeur réelle, en fonction des besoins des clients du monde entier.

Localisation
robuste

Contrôle optimal
du véhicule

Soutien total de
la cinématique

Trajet
optimisé

Option d'évitement
d'obstacles

Contrôle
de fourche

Contrôle de
mission embarqué
Traqueur de palette/
rack/chariot/external

Soutien total de
l'intégration (y compris sur site)
Option GNSS pour
utilisation en extérieur

Localisation
robuste-
Contrôle optimal
du véhicule -
Soutien total de
la cinématique -
Trajet
optimisé -
Option d'évitement
d'obstacles -
Contrôle
de fourche -
Contrôle de
mission embarqué -
Traqueur de palette/
rack/chariot -
Soutien total de
l'intégration (y compris sur site) 
Option GNSS pour utilisation en extérieur
En plus avec
ANT server

Gestionnaire de flotte

Planification intelligente
des missions

Contrôle
du traffic

Gestion de
la batterie

Interface
d'équipement

Simulation
de mission

Surveillance
du système

Connexion de l'API
au WMS/MES/ERP
-
Gestionnaire de flotte
-
Planification intelligente
des missions -
Contrôle
du traffic -
Gestion de
la batterie -
Interface
d'équipement -
Simulation
de mission -
Surveillance
du système -
Connexion de l'API
au WMS/MES/ERP
« Après une semaine à préparer la carte et les positions de chargement/déchargement, nous avons mis en service la flotte de véhicules de notre client et nous avons pu exécuter une production complète la même journée. Nous avons 12 AGV et 6 positions de chargement allant vers 80 positions de déchargement. Les performances et la stabilité du logiciel ANT lab de BlueBotics, nous a fait gagner beaucoup de temps lors de la mise en service. »
Kurtis Schram![]() Application Developer, Cimcorp North America
Application Developer, Cimcorp North America
« ANT est géniale, mais ce qui fait aussi la différence, c'est le service que vous proposez. Les réponses sont immédiates et vous répondez toujours. Cela fait vraiment la différence. »
Miguel de Sebastian![]() CEO, DTA
CEO, DTA
« La technologie BlueBotics est le logiciel de navigation sans infrastructure le plus robuste du marché. Nous ne pouvions pas croire à son potentiel, ni à sa précision, avant de l’avoir vu de nos propres yeux. Et lors de l'intégration d'ANT sur nos chariots élévateurs, les conseils ciblés de l'équipe d'assistance ont été excellents, tout simplement les meilleurs. »
Thanassis Papaleloudis![]() CEO, LIFTCO E.E.
CEO, LIFTCO E.E.
« Nous nous sommes appuyés sur l'assistance technique très utile et professionnelle de BlueBotics pour développer une solution automatisée pour le transfert de composants très lourds. Notre AGV travaille main dans la main avec notre station de bras robotique, offrant une grande efficacité avec moins de main-d'œuvre. »
Francis Tan![]() Directeur, Azimuth Technologies
Directeur, Azimuth Technologies
SUPPORT D'EXPERT EN
INTÉGRATION ET INSTALLATION
Lorsque vous choisissez la navigation sans infrastructure ANT, notre équipe d'ingénieurs expérimentés travaille en étroite collaboration avec vous pour assurer l'intégration réussie de cette technologie dans votre véhicule.
Langues:
EN, FR, IT
Langues:
EN, FR
Langues:
EN, FR
23 ANS
 DE NAVIGATION
DE NAVIGATION
SANS INFRASTRUCTURE5'000+
VÉHICULES ANT
EN FONCTION1'000+
INSTALLATIONS CHEZ
LES UTILISATEURS
FINAUX10+
MILLIONS DE KM
PILOTÉS PAR ANT
Product
Finder
DE QUEL PRODUIT ANT AI-JE BESOIN ?
Pour identifier le meilleur système de navigation ANT pour votre véhicule, utilisez notre outil de recherche de produits ou le tableau de comparaison ci-dessous. Vous pouvez également planifier un appel avec notre équipe pour discuter de vos besoins.
Comparez les produits ANT
Localization
Contrôle
Émulation du suivi de ligne
Gestion de mission
Gestion de flotte
Fonctionnement à l'extérieur

ANT lite+
ANT localization+
ANT localization
DISCUTONS DE VOS BESOINS DE NAVIGATION AUTONOME
Avez-vous une question sur la technologie de navigation à choisir ? Souhaitez-vous discuter d'une application spécifique ? Ou êtes-vous curieux de voir une démo de la technologie ANT à l'écran ? Cliquez ci-dessous pour contacter notre équipe d'experts.
