Is it SLAM Navigation? 7 ANT Navigation Myths Busted
Autonomous navigation can be confusing. Here we dispel the most common myths about BlueBotics’ ANT navigation technology, starting with that SLAM question…
MYTH 1: ANT IS SLAM NAVIGATION
BUSTED: ANT natural feature navigation does not use SLAM during navigation. In fact, almost no autonomous navigation solutions use SLAM for navigation itself. Instead, most technologies – including ANT – use SLAM just once, to create their initial site map.
To break down this myth, we must first explain what SLAM navigation is. Simultaneous Localization and Mapping (SLAM) is an algorithmic approach, which is used by most types of natural navigation technology to construct a map of an environment. This map is then used by automated guided vehicles (AGVs) to calculate their position and navigate through that environment.
Side note: natural navigation is sometimes called ‘free navigation’, ‘tapeless navigation’ or, more confusingly, ‘SLAM navigation’.
With natural navigation technologies, in most cases SLAM is only used to create the initial reference map of a site. This process takes place during the commissioning (installation) of the site’s first AGV.
In some rare cases, however – with some ‘scan matching’ versions of natural navigation – SLAM is used to both construct and then regularly update a grid-based map of the environment. This approach creates challenges in terms of accuracy and repeatability since updating the coordinates of structures in the map makes it extremely difficult, if not impossible, to guarantee a stable setup. This updating-the-map approach is also demanding in terms of the wireless connectivity required on-site, since every time the map is updated it must be downloaded in close to real-time from a central server by every vehicle in the fleet.
With Autonomous Navigation Technology (ANT) by BlueBotics, this is not the case. SLAM is used only once – during the initial creation of the site map.

Here’s how the map creation process works with ANT:
- To create the site map, an integrator drives the vehicle manually around the site, the data from its safety laser scanner(s) being used to create the raw site map. To confirm, this specific process does use SLAM.
- The integrator then removes temporary or dynamic objects (such as boxes, pallets, other vehicles and so on) from the map, using BlueBotics’ ANT lab software.
- The result is a clean map that includes only the site’s permanent, static features, such as walls, pillars and fixed machinery (and, if required due to there being few ‘natural’ features in the environment, reflective stickers).
- Thereafter, ANT’s software matches these permanent references with the vehicle’s laser scanner data during missions (a.k.a. feature matching), enabling it to accurately calculate the vehicle’s position and thus navigate effectively.
Since only original, permanent features are used as references to calculate the vehicle’s position, this guarantees high precision over time – there is no chance of measurement errors creeping in and compounding. The map is never updated. It never changes.
For example, the very first ANT driven vehicle ever installed – an Esatroll Paquito AGV commissioned at Dal Colle (Barilla Group) in Italy in 2009 – still performs its missions using its original site map! The permanent structure of the building has not changed, so the map didn’t need to either.
MYTH 2: NATURAL FEATURE NAVIGATION IS NOT RELIABLE
BUSTED: ANT is extremely reliable and robust.
Let’s be clear. It is not at all easy to ensure the repeatability and reliability of an automated vehicle’s operations using natural feature navigation. However, ANT achieves this, repeatedly over time and without loss of accuracy.
With ANT navigation, a vehicle’s exact position in the map is determined using ‘feature matching’ (matching permanent references in the map to the vehicle’s laser scanner data) and odometry, used to measure the vehicle’s change in position by computing its movement. A feature matching approach works well, in part, because features like segments of wall and pillars are highly distinctive, in terms of the specific size and angle of each. This means they are easy for ANT to identify and successfully match.
By contrast, most other forms of natural navigation work at the level of laser measures (i.e. points). These are stored in a grid map and used to match a vehicle’s laser’s measurements during operation (so-called ‘scan matching’).
Put another way, ANT is working at a higher level of abstraction: rather than working at the level of laser measures (points), it is working at the level of structures (walls, pillars etc.). This makes ANT’s matching process, and its map, more robust and resilient against dynamic changes in the environment. Because there are no temporary objects being mapped – remember, these are removed from the map during commissioning – a potential contributor of compounding positioning errors is removed. If the permanent ‘natural features’ used for vehicle positioning do not change, there is no reason for the accuracy of an ANT driven vehicle’s operations to degrade.
When our team at BlueBotics speaks to longstanding customers about their analyses and tests of different AGV guidance technologies, the robustness of ANT is the reason many give for selecting and retaining BlueBotics as their navigation partner of choice.

MYTH 3: OBSTACLE AVOIDANCE ALWAYS MEANS GREATER EFFICIENCY
BUSTED: Obstacle avoidance suits some operations, but virtual path following is often (counterintuitively) more efficient.
When it comes to moving autonomously through an environment, AGVs and AMRs driven by natural feature navigation tend to use one of two modes:
- Virtual path following: the vehicle stops when an obstacle is blocking its assigned path, or
- Obstacle avoidance: the vehicle navigates dynamically around any obstacle before trying to find its way back to its assigned path as quickly as possible.
ANT navigation offers both approaches, but which is the most efficient? It depends on the application.
With service robots such as Cleanfix’s robotic floor scrubbers, these need to cover every inch of ground in a defined area, but the order in which they cover it is not so important. And in the places where they work, like commercial centres, there are plenty of obstacles such as people milling around. In such cases, an obstacle avoidance approach is a great fit.
However, in industrial applications where AGVs are being used to automate material handling tasks, it may seem counterintuitive but most often the ‘stop and wait’ approach used by virtual path following is the most efficient.
BlueBotics’ CEO, Dr. Nicola Tomatis, explains: “Even with perfect obstacle avoidance, if your AGVs or AMRs have to move around objects, that slows down their progress compared to path followers, where the staff is trained to keep routes free.”
In addition, full obstacle avoidance makes optimal traffic management close to impossible, meaning the performance of an entire fleet could be highly degraded by the freedom of a single vehicle using obstacle avoidance.
Dr. Tomatis comments, “Consider the feedback we received recently from one customer, a North American AGV manufacturer. One of its customers, a tire manufacturer, previously operated a fleet of 37 AGVs, all of which used obstacle avoidance. When the company decided to retrofit these vehicles, however, it went with pure path-following ANT navigation in tandem with ANT server fleet management software. The tire company actually installed seven fewer AGVs in all. But the 30 it now uses have proven to be 10% more productive than its previous 37. When it comes to overall efficiency, that’s the path following difference.”
> Related: Obstacle Avoidance for AGVs — Dream Feature or Dangerous Gimmick?
MYTH 4: NAVIGATION SCANNERS GO ON TOP
BUSTED: ANT typically uses a vehicle’s existing safety laser scanner(s), positioned at the base of the vehicle.
Some AGVs that use natural navigation technology employ a dedicated LiDAR laser scanner for navigation. This sensor is usually positioned high up on the vehicle in order that it can ‘see’ as much of the environment as possible.
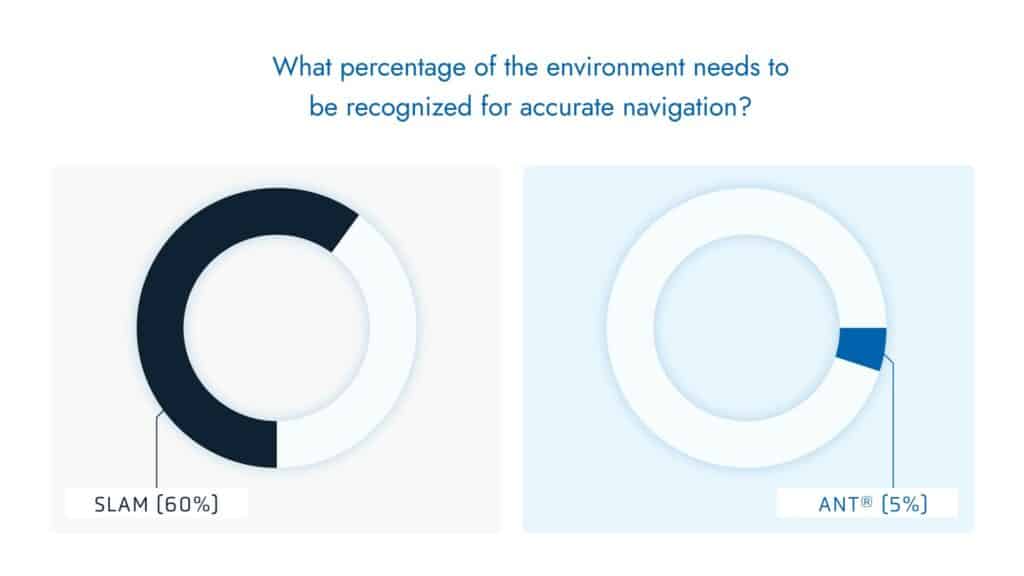
This sensor position usually signifies that a natural navigation system uses a ‘scan matching’ methodology rather than a ‘feature matching’ approach (see Myth 2). Since scan matching typically requires the identification of around 60% of a site’s features to work well, placing a scanner high up on the vehicle makes a lot of sense: it can simply see more of the site than when measuring at floor height.
However, with ANT natural feature navigation this high scanner position is not required.
With ANT, a vehicle’s position in the site map is determined using a mix of feature matching (matching permanent map references to the vehicle’s laser scanner data) and odometry, used to measure the vehicle’s change in position by computing its movement. As such, ANT only needs to intermittently ‘see’ a few environmental references – walls, columns and so on – for precise vehicle localization.
Instead of the 60% of references needed by scan matching systems, ANT performs with a high degree of accuracy if a vehicle’s scanners can only ‘see’ 5% – or even less – of the environment. In fact, a vehicle will continue moving along its route even if zero features are recognized during a period of a few seconds. Using a vehicle’s existing safety lasers for positioning – even if they are at ankle height and have relatively limited visibility – does not pose a problem.
In summary, placing navigation scanners high up on vehicles is useful, but only for systems that require a high level of references to work efficiently. It is feasible with ANT also, but not really required.
Additional benefits of using safety laser scanners for vehicle positioning
1. Because it uses data from a vehicle’s safety laser scanners, ANT natural feature navigation suits every type of vehicle form factor. By contrast, if a vehicle uses scan matching for positioning and therefore needs its navigation scanner to be placed high up, this means ‘underride’ (a.k.a. ‘mouse’) type AGVs cannot be developed.
2. Using a vehicle’s existing safety scanners instead of a separate navigation scanner means one less component for the vehicle maker to purchase and integrate. It also means one less point of potential failure.
MYTH 5: ANT DRIVEN VEHICLES CANNOT NAVIGATE OUTDOORS
BUSTED: ANT driven vehicles can and do navigate outdoors.
Operating AGVs outdoors was traditionally a real challenge. Most outdoor areas have a lack of natural features. In the past this made it difficult to calculate a vehicle’s position, meaning additional infrastructure sometimes needed to be added.
Our product extension, ANT everywhere meets this challenge by adding high-precision GNSS as an additional data source with which to calculate a vehicle’s position.
The result is that outdoor AGV operations can be as simple, robust and precise as those indoors.
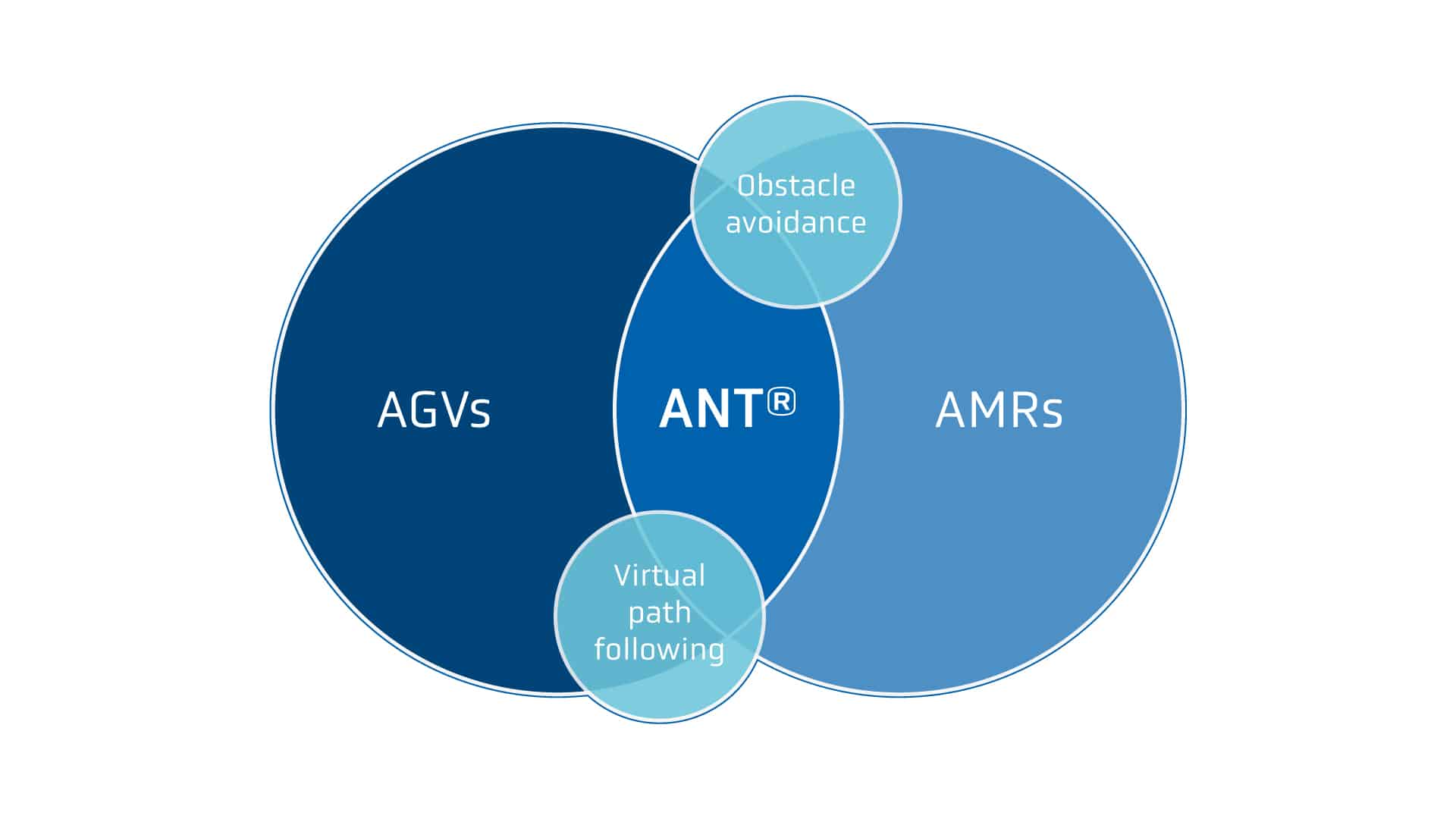
MYTH 6: ANT IS FOR AGVS, NOT AMRS
BUSTED: Both AGVs and AMRs can be, and are, driven by ANT.
According to the safety standard For Industrial Mobile Robots – Safety Requirements ANSI/RIA R15.08-1-2020 (R15.08), “The fundamental difference between AGVs and AMRs is characterized by how they traverse the specified operating environment. An AGV traverses the specified operating environment automatically along predefined guide paths (virtual or physical) using collision avoidance” whereas the standard defines AMRs as able to “traverse the specified operating environment by detecting obstacles using sensors and adjusting paths by computing an obstacle-free path through free space rather than using a predefined path.”
So which type of automated vehicle does ANT navigation suit? The answer is both. Since ANT offers virtual path following (a.k.a. guide paths) and obstacle avoidance modes, it can drive them all.
To illustrate the compatibility of ANT with these two navigation modes, the video below features a mixed fleet of different brand AGVs (using virtual path following) and BlueBotics AMRs (using obstacle avoidance). All of these vehicles are managed by BlueBotics ANT server software in a single project.
MYTH 7: ANT NEEDS TO SEE ALL OF THE ENVIRONMENT, ALL OF THE TIME.
BUSTED: Even with minimal references visible, ANT driven vehicles perform
A common misconception is that every type of navigation system needs to be able to see or identify numerous references in the environment, continually, for a vehicle to be able to accurately calculate its position.
That is the case for some navigation technologies, but not for ANT.
An ANT driven vehicle can calculate its position even if very few environmental features are visible. One reason for this is that within the system’s positioning algorithm, laser scanner data is supplemented with robust odometry, which calculates the speed and position of the vehicle. As a result, if one or more objects – another vehicle say – block a laser scanner’s line-of-sight to several references, this does not pose a problem. In fact, it is incredibly rare for an ANT driven vehicle to stop and become ‘lost’ since a vehicle can operate effectively even if fewer than 5% of the environmental references used for positioning are visible.
By contrast, SLAM-based navigation systems need to see many more references to position or ‘localize’ an AGV in the map (see myth 1). And laser triangulation technologies (sometimes called laser guided vehicles or LGVs) rely instead on direct line-of-sight access to at least three reflective targets at a time in order to work.
In this article, we’ve busted the most common myths about ANT natural feature navigation by BlueBotics. If you have more questions about how ANT compares to scan matching or continuous SLAM navigation, watch our on-demand webinar, Paths to Success. Or better yet, get in touch and our expert team will be glad to help.
Let's get Started
Take the first step to automating your vehicle.
Schedule a call with our expert team today.