EST-CE LA NAVIGATION SLAM ? 7 MYTHES DE NAVIGATION ANT RÉFUTÉS
La navigation autonome peut prêter à confusion. Ici, nous dissipons les mythes les plus courants sur la technologie de navigation ANT de BlueBotics, à commencer par cette question de SLAM…
MYTHE 1 : ANT EST UNE NAVIGATION SLAM
RÉFUTATION : La navigation sans infrastructure ANT n’utilise pas SLAM pendant la navigation. En fait, presqu’aucune solution de navigation autonome n’utilise SLAM pour la navigation elle-même. À la place, la plupart des technologies – y compris ANT – n’utilisent SLAM qu’une seule fois, pour créer leur plan de site initial.
Pour briser ce mythe, nous devons d’abord expliquer ce qu’est la navigation SLAM. « Simultaneous Localization and Mapping » (la localisation et la cartographie simultanées – SLAM) est une approche algorithmique utilisée par la plupart des types de technologie de navigation naturelle pour cartographier un environnement. Cette carte est ensuite utilisée par les véhicules à guidage automatique (AGV) pour calculer leur position et naviguer dans cet environnement.
Remarque : la navigation naturelle est parfois appelée « navigation libre », « navigation sans ligne physique au sol » ou, ce qui peut prêter à confusion, « navigation SLAM ».
Avec les technologies de navigation naturelle, dans la plupart des cas, SLAM n’est utilisé que pour créer la carte de référence initiale d’un site. Ce processus a lieu lors de la mise en service (installation) du premier AGV du site.
Dans certains cas rares, cependant – avec certaines versions de navigation naturelle de « mise en correspondance par scan » – SLAM est utilisé à la fois pour élaborer et pour mettre à jour régulièrement une carte en grille de l’environnement. Cette approche crée des défis en termes de précision et de répétabilité car la mise à jour des coordonnées des structures sur la carte rend extrêmement difficile, voire impossible, de garantir une configuration stable. Cette approche de mise à jour de la carte est également exigeante en termes de la connectivité sans fil requise sur site, car chaque fois que la carte est mise à jour, elle doit être téléchargée en temps quasi réel à partir d’un serveur central par chaque véhicule de la flotte.
Avec la technologie de navigation autonome (ANT) de BlueBotics, ce n’est pas le cas. SLAM n’est utilisé qu’une seule fois – lors de la création initiale du plan du site.

Voici comment le processus de cartographie fonctionne avec ANT :
- Pour créer le plan du site, un intégrateur conduit manuellement le véhicule autour du site, les données de son/ses scanner(s) laser de sécurité étant utilisées pour créer le plan brut du site. Pour être clair, ce processus spécifique utilise bien SLAM.
- L’intégrateur supprime ensuite les objets temporaires ou dynamiques (tels que les boîtes, les palettes, les autres véhicules, etc.) de la carte, à l’aide du logiciel ANT lab de BlueBotics.
- Le résultat est une carte propre qui ne comprend que les caractéristiques permanentes du site, tels que les murs, les piliers et les machines fixes (et, si nécessaire en raison du peu d’éléments « naturels » de l’environnement, des autocollants réfléchissants).
- L’intégrateur définit ensuite les éléments permanents qui seront utilisés comme références. Par la suite, le logiciel ANT fait correspondre ces références avec les données du scanner laser du véhicule pendant les missions (ou mise en correspondance par caractéristiques), ce qui lui permet de calculer avec précision la position du véhicule et ainsi de naviguer efficacement.
Étant donné que seules les caractéristiques originales et permanentes sont utilisées comme références pour calculer la position du véhicule, cela garantit une grande précision avec le temps – il n’y a aucun risque que des erreurs de mesure ne s’y faufilent et se multiplient. La carte n’est jamais mise à jour. Elle ne change jamais.
Par exemple, le tout premier véhicule guidé par ANT à être installé – un AGV Esatroll Paquito mis en service chez Dal Colle (Groupe Barilla) en Italie en 2009 – continue de remplir ses missions en utilisant le plan original du site ! La structure permanente du bâtiment n’a pas changé, donc pas besoin de changer la carte non plus.
MYTHE 2 : LA NAVIGATION SANS INFRASTRUCTURE N’EST PAS FIABLE
RÉFUTATION : ANT est extrêmement fiable et robuste.
Soyons clairs. Il n’est pas du tout facile d’assurer la répétabilité et la fiabilité des opérations d’un véhicule automatisé à l’aide de la navigation sans infrastructure. Cependant, ANT® y parvient, de manière répétée dans le temps et sans perte de précision.
Avec la navigation ANT®, la position exacte d’un véhicule sur la carte est déterminée à l’aide de la « mise en correspondance par caractéristiques » (la mise en correspondance des références permanentes de la carte avec les données du scanner laser du véhicule) et de l’odométrie, utilisée pour mesurer le changement de position du véhicule en calculant son mouvement. Une approche de mise en correspondance par caractéristiques fonctionne bien, en partie, parce que les caractéristiques telles que les segments de mur et les piliers sont très distinctives en termes de la taille et l’angle spécifiques de chacune. Cela signifie que la technologie ANT® peut facilement les identifier et les mettre en correspondance correctement.
En revanche, la plupart des autres formes de navigation naturelle fonctionnent au niveau des mesures laser (c’est-à-dire des points). Celles-ci sont stockées dans une carte quadrillée et utilisées pour une mise en correspondance avec les mesures laser d’un véhicule pendant son fonctionnement (ce que l’on appelle la « mise en correspondance par scan »).
En d’autres termes, ANT travaille à un niveau d’abstraction supérieur : plutôt que de travailler au niveau des mesures laser (points), il travaille au niveau des structures (murs, piliers, etc.). Cela rend le processus de mise en correspondance de la technologie ANT et sa carte plus robustes et résilients face aux changements dynamiques de l’environnement. Étant donné qu’aucun objet temporaire n’est cartographié – rappelez-vous, ils sont supprimés de la carte lors de la mise en service – cela supprime un contributeur potentiel aux erreurs de positionnement aggravées. Si les « caractéristiques naturelles » permanentes utilisées pour le positionnement du véhicule ne changent pas, il n’y a aucune raison pour que la précision des opérations d’un véhicule guidé par ANT se dégrade.
Lorsque notre équipe de BlueBotics parle à des clients de longue date au sujet de leurs analyses et tests de différentes technologies de guidage AGV, la robustesse de la technologie ANT® est la raison que beaucoup invoquent pour choisir et retenir BlueBotics comme partenaire de navigation de choix.

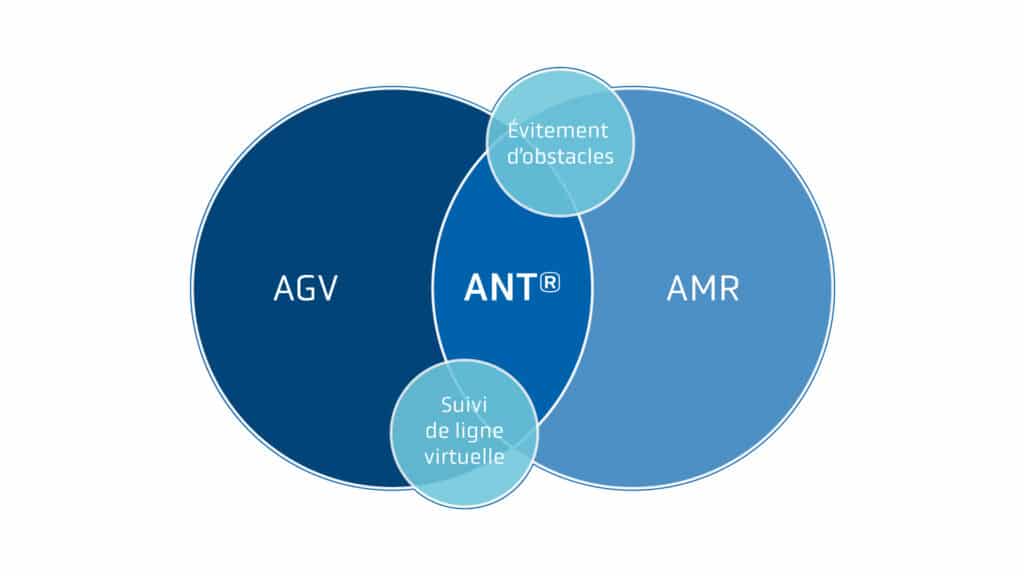
MYTHE 3 : ÉVITER LES OBSTACLES EST TOUJOURS PLUS EFFICACE
RÉFUTATION : L’évitement d’obstacles convient à certaines opérations, mais le suivi de ligne virtuelle est souvent (paradoxalement) plus efficace.
Lorsqu’il s’agit de se déplacer de manière autonome dans un environnement, les AGV et les AMR pilotés par la navigation sans infrastructure ont tendance à utiliser l’un de deux modes :
- Le suivi de ligne virtuelle : le véhicule s’arrête lorsqu’un obstacle bloque sa trajectoire assignée, ou
- L’évitement d’obstacles : le véhicule navigue dynamiquement autour de tout obstacle avant d’essayer de retrouver le plus rapidement possible son chemin vers sa trajectoire assignée.
La navigation ANT offre les deux approches, mais quelle est la plus efficace ? Cela dépend de l’application.
Avec les robots de service tels que les laveurs de sol robotiques de Cleanfix, ceux-ci doivent couvrir chaque centimètre carré du sol dans une zone définie, mais l’ordre dans lequel ils le couvrent n’est pas très important. Et dans les lieux où ils travaillent, comme les centres commerciaux, il y a beaucoup d’obstacles tels que les gens qui se déplacent. Dans de tels cas, une approche d’évitement d’obstacles convient parfaitement.
Cependant, dans les applications industrielles où les AGV sont utilisés pour automatiser les tâches de manutention, cela peut sembler paradoxal, mais le plus souvent l’approche « arrêt et attente » utilisée par le suivi de ligne virtuelle est la plus efficace.
Le PDG de BlueBotics, le Dr Nicola Tomatis, explique : « Même en évitant parfaitement les obstacles, si vos AGV ou AMR doivent se déplacer autour d’objets, cela ralentit leur progression par rapport aux suiveurs de ligne, où le personnel est formé à garder les itinéraires libres. »
De plus, l’évitement complet des obstacles rend la gestion optimale du trafic quasiment impossible, ce qui signifie que les performances d’une flotte entière pourraient être fortement dégradées par la liberté d’un seul véhicule utilisant l’évitement d’obstacles.
Le Dr Tomatis commente : « Réfléchissez aux commentaires que nous avons reçus récemment d’un client, un fabricant d’AGV d’Amérique du Nord. Un de ses clients, un fabricant de pneumatiques, exploitait auparavant une flotte de 37 AGV qui utilisaient tous l’évitement d’obstacles. Cependant, lorsque la société a décidé de moderniser ces véhicules, elle a opté pour une navigation ANT purement par suivi de ligne en tandem avec le logiciel de gestion de flotte ANT server. L’entreprise de pneumatiques a en fait installé sept AGV de moins en tout. Mais les 30 qu’elle utilise maintenant se sont révélés 10% plus productifs que les 37 qu’elle avait auparavant. En termes d’efficacité globale, c’est la différence du suivi de ligne. »
> Article associé (EN) : L’évitement d’obstacles pour les AGV – Fonctionnalité de rêve ou artifice dangereux ?
MYTHE 4 : LES SCANNERS DE NAVIGATION SE TROUVENT EN HAUT
RÉFUTATION : ANT utilise généralement les scanners laser de sécurité existants d’un véhicule, positionnés à la base du véhicule.
Certains AGV qui utilisent la technologie de navigation naturelle utilisent un scanner laser LiDAR dédié à la navigation. Ce capteur est généralement positionné en hauteur sur le véhicule afin qu’il puisse « voir » autant que possible l’environnement.
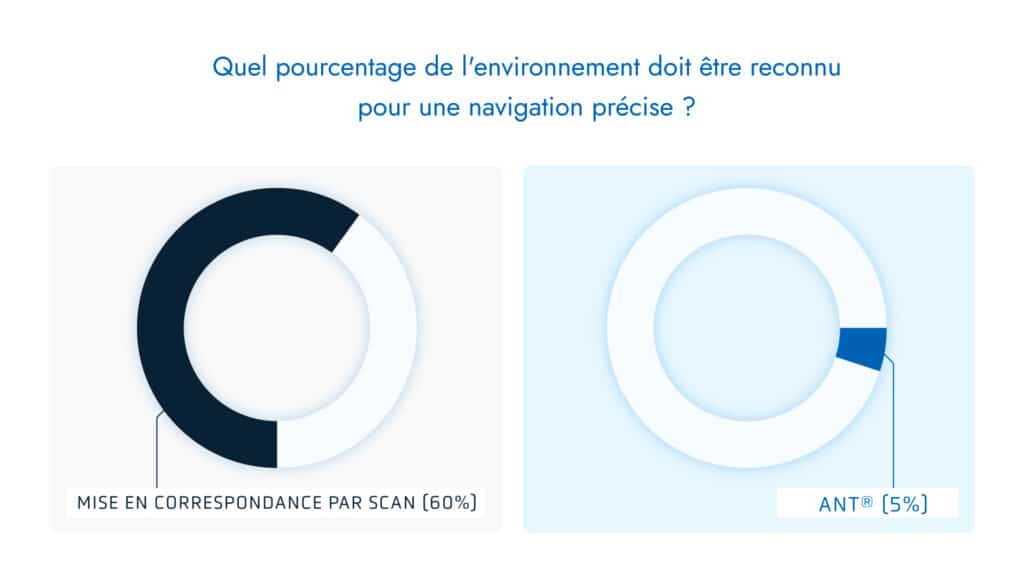
Cette position du capteur signifie généralement qu’un système de navigation naturelle utilise une méthodologie de « mise en correspondance par scan » plutôt qu’une approche de « mise en correspondance par caractéristiques » (voir Mythe 2). Étant donné que la mise en correspondance par scan nécessite généralement l’identification d’environ 60% des caractéristiques d’un site pour fonctionner correctement, placer un scanner en hauteur sur le véhicule a beaucoup de sens : il peut tout simplement voir plus du site que lors de la mesure à hauteur du sol.
Cependant, avec la navigation sans infrastructure ANT, cette position élevée du scanner n’est pas nécessaire.
Avec ANT, la position d’un véhicule sur la carte du site est déterminée à l’aide d’un mélange de mise en correspondance par caractéristiques (mise en correspondance des références cartographiques permanentes aux données du scanner laser du véhicule) et de l’odométrie, utilisée pour mesurer le changement de position du véhicule en calculant son mouvement. Ainsi, ANT n’a besoin que de « voir » par intermittence quelques références environnementales – murs, colonnes, etc. – pour localiser précisément le véhicule.
Au lieu des 60% de références nécessaires aux systèmes de mise en correspondance par scan, ANT fonctionne avec un haut degré de précision même si les scanners d’un véhicule ne peuvent « voir » que 5% – voire moins – de l’environnement. En fait, un véhicule continuera à se déplacer le long de son itinéraire pendant une période de quelques secondes même si aucune caractéristique n’est reconnue. L’utilisation des lasers de sécurité existants d’un véhicule pour le positionnement – même s’ils sont à hauteur de la cheville et ont une visibilité relativement limitée – ne pose pas de problème.
En résumé, placer les scanners de navigation en hauteur sur les véhicules est utile, mais uniquement pour les systèmes qui nécessitent beaucoup de références pour fonctionner efficacement. C’est également faisable avec ANT, mais pas vraiment nécessaire.
Avantages supplémentaires de l’utilisation de scanners laser de sécurité pour le positionnement des véhicules
1. Parce qu’elle utilise les données des scanners laser de sécurité du véhicule, la fonction de navigation sans infrastructure ANT convient à chaque type de facteur de forme de véhicule. En revanche, si un véhicule utilise la mise en correspondance par scan pour le positionnement et a donc besoin que son scanner de navigation soit placé en hauteur, cela signifie qu’on ne peut pas développer d’AGV à hauteur réduite (ou « souris »).
2. L’utilisation des scanners de sécurité existants d’un véhicule au lieu d’un scanner de navigation séparé signifie un composant en moins que le constructeur du véhicule doit acheter et intégrer. Cela signifie également un point de défaillance potentielle en moins.
MYTHE 5 : LES VÉHICULES GUIDÉS PAR ANT NE PEUVENT PAS NAVIGUER À L’EXTÉRIEUR
RÉFUTATION : Les véhicules guidés par ANT peuvent naviguer à l’extérieur et le font.
Operating AGVs outdoors was traditionally a real challenge. Most outdoor areas have a lack of natural features. In the past this made it difficult to calculate a vehicle’s position, meaning additional infrastructure sometimes needed to be added.
Our product extension, ANT everywhere meets this challenge by adding high-precision GNSS as an additional data source with which to calculate a vehicle’s position.
The result is that outdoor AGV operations can be as simple, robust and precise as those indoors.
MYTHE 6 : ANT EST POUR LES AGV, PAS LES AMR
RÉFUTATION : Les AGV et les AMR peuvent être, et sont, pilotés par ANT.
Selon la norme américaine de sécurité pour les robots mobiles industriels – Exigences de sécurité ANSI / RIA R15.08-1-2020 (R15.08), « La différence fondamentale entre les AGV et les AMR est caractérisée par la manière dont ils traversent l’environnement d’exploitation spécifié. Un AGV parcourt automatiquement l’environnement d’exploitation spécifié le long de lignes de guidage prédéfinis (virtuelles ou physiques) en évitant les collisions », alors que la norme définit les AMR comme capables de « traverser l’environnement d’exploitation spécifié en détectant les obstacles à l’aide de capteurs et en ajustant leur trajectoire en calculant un chemin sans obstacle à travers un espace libre plutôt que d’utiliser une ligne prédéfinie. »
Alors, à quel type de véhicule automatisé la navigation ANT convient-elle ? La réponse est les deux. Étant donné que la navigation ANT offre les modes de suivi de ligne virtuelle (ou chemins de guidage) et d’évitement d’obstacles, il peut tous les guider.
Pour illustrer la compatibilité d’ANT avec ces deux modes de navigation, la vidéo ci-dessous présente une flotte mixte d’AGV de marques différentes (qui utilisent le suivi de ligne virtuelle) et d’AMR BlueBotics (qui utilisent l’évitement d’obstacles). Tous ces véhicules sont gérés par le logiciel ANT server de BlueBotics au sein d’un seul projet.
MYTHE 7 : ANT A BESOIN DE VOIR TOUT L’ENVIRONNEMENT, TOUT LE TEMPS.
RÉFUTATION : Même avec des références minimales visibles, les véhicules à conduite ANT sont performants.
Une idée fausse courante est que tout type de système de navigation doit être capable de voir ou d’identifier de nombreuses références dans l’environnement, en permanence, pour qu’un véhicule puisse calculer sa position avec précision.
C’est le cas pour certaines technologies de navigation, mais pas pour ANT.
Un véhicule piloté par ANT peut calculer sa position même si très peu d’éléments de l’environnement sont visibles. Cela s’explique notamment par le fait que, dans l’algorithme de positionnement du système, les données du scanner laser sont complétées par une odométrie robuste, qui calcule la vitesse et la position du véhicule. Par conséquent, si un ou plusieurs objets – un autre véhicule par exemple – bloquent la ligne de visée du scanner laser sur plusieurs références, cela ne pose pas de problème. En fait, il est extrêmement rare qu’un véhicule conduit par un ANT s’arrête et se perde, car un véhicule peut fonctionner efficacement même si moins de 5 % des références environnementales utilisées pour le positionnement sont visibles.
En revanche, les systèmes de navigation basés sur la SLAM ont besoin de voir beaucoup plus de références pour positionner ou « localiser » un AGV sur la carte (voir le mythe 1). Quant aux technologies de triangulation laser (parfois appelées véhicules guidés par laser ou LGV), elles reposent sur un accès en visibilité directe à au moins trois cibles réfléchissantes à la fois pour fonctionner.
Dans cet article, nous avons réfuté les mythes les plus courants sur la navigation sans infrastructure ANT de BlueBotics. Si vous avez d’autres questions sur comment ANT se compare à la mise en correspondance par scan ou à la navigation SLAM continue, regardez notre webinaire à la demande, Paths to Success [Chemins du succès]. Ou mieux encore, contactez-nous et notre équipe d’experts se fera un plaisir de vous aider.
_integrated_into_the_vehicle")
Commençons
Faites le premier pas vers l'automatisation de votre véhicule.
Planifiez un appel avec notre équipe d'experts dès aujourd'hui.