Navigazione Slam? 7 Miti Sulla Navigazione Ant Sfatati
La navigazione autonoma può suscitare dubbi e disorientare. Qui sfatiamo i miti più comuni sulla tecnologia di navigazione ANT di BlueBotics, a partire dalla domanda sulla SLAM …
MITO 1: ANT È LA NAVIGAZIONE SLAM
SFATATO: Il sistema di navigazione a guida autonoma ANT non utilizza SLAM durante la navigazione. In effetti, quasi nessuna soluzione di navigazione autonoma utilizza SLAM per la navigazione stessa. Invece, la maggior parte delle tecnologie, tra cui ANT, utilizza SLAM solo una volta, per creare la mappa del sito iniziale.
Per sfatare questo mito, dobbiamo prima spiegare cos’è la navigazione SLAM. Simultaneous Localization and Mapping (SLAM) è un approccio algoritmico, utilizzato dalla maggior parte dei tipi di tecnologia di navigazione naturale per costruire una mappa di un ambiente. Questa mappa viene quindi utilizzata dai veicoli a guida automatica (AGV) per calcolare la loro posizione e navigare in quell’ambiente.
Nota a margine: la navigazione naturale è talvolta chiamata “navigazione libera”, “navigazione tapeless” o, in modo più generico, “navigazione SLAM”.
Con le tecnologie di navigazione naturale, nella maggior parte dei casi SLAM viene utilizzata solo per creare la mappa di riferimento iniziale di un sito. Questo processo ha luogo durante la messa in servizio (installazione) del primo AGV del sito.
In alcuni rari casi, tuttavia, con alcune versioni “scan matching” della navigazione naturale, SLAM viene utilizzata sia per costruire che per aggiornare regolarmente una mappa dell’ambiente basata su una griglia. Questo approccio determina delle sfide in termini di accuratezza e ripetibilità poiché l’aggiornamento delle coordinate delle strutture nella mappa rende estremamente difficile, se non impossibile, garantire una configurazione stabile. Questo approccio di aggiornamento della mappa ha delle elevate esigenze anche in termini di connettività wireless in loco, poiché ogni volta che la mappa viene aggiornata deve essere scaricata quasi in tempo reale da un server centrale da ogni veicolo della flotta.
Con la tecnologia di navigazione autonoma (ANT) di BlueBotics, questo problema viene evitato. SLAM viene utilizzata una sola volta, durante la creazione iniziale della mappa del sito.

Ecco come funziona il processo di creazione della mappa con ANT:
- Per creare la mappa del sito, un integratore guida il veicolo manualmente intorno al sito, raccogliendo e utilizzando i dati dei suoi laser scanner di sicurezza per creare la mappa grezza del sito Questo processo nello specifico utilizza la tecnologia SLAM.
- L’integratore rimuove quindi gli oggetti temporanei o dinamici (come scatole, pallet, altri veicoli e così via) dalla mappa, utilizzando il software di laboratorio ANT di BlueBotics.
- Il risultato è una mappa pulita che include solo le caratteristiche permanenti del sito, come muri, pilastri e macchinari fissi (e, se necessario, a causa della presenza di poche caratteristiche “naturali” nell’ambiente, anche adesivi riflettenti).
- L’integratore definisce quindi quali caratteristiche permanenti verranno utilizzate come riferimenti. Successivamente, il software di ANT confronta questi riferimenti con i dati dello scanner laser del veicolo raccolte durante le missioni (ovvero la corrispondenza delle caratteristiche), consentendo di calcolare con precisione la posizione del veicolo e quindi di navigare in modo efficace.
Poiché solo le caratteristiche originali e permanenti vengono utilizzate come riferimento per calcolare la posizione del veicolo, ciò garantisce un’elevata precisione nel tempo: non vi è alcuna possibilità di eventuali errori di misurazione. La mappa non viene mai aggiornata e non cambia mai.
Ad esempio, il primissimo veicolo con guida ANT mai installato,- un AGV Esatroll Paquito commissionato presso Dal Colle (Gruppo Barilla) in Italia nel 2009 – svolge ancora le sue missioni utilizzando la mappa del sito originale! La struttura permanente dell’edificio non è cambiata, quindi nemmeno la mappa ha subito alcuna modifica.
MITO 2: LA NAVIGAZIONE CON FUNZIONI NATURALI NON È AFFIDABILE
SFATATO: ANT è estremamente affidabile e solida.
Siamo chiari. Non è affatto facile garantire la ripetibilità e l’affidabilità delle operazioni di un veicolo automatizzato utilizzando la navigazione naturale. Tuttavia, ANT raggiunge questo obiettivo e lo fa in maniera costante nel tempo e senza perdita di precisione.
Con la navigazione ANT, la posizione esatta di un veicolo sulla mappa viene determinata utilizzando la “corrispondenza delle caratteristiche” (corrispondenza dei riferimenti permanenti sulla mappa ai dati dello scanner laser del veicolo) e l’odometria, utilizzata per misurare il cambiamento di posizione del veicolo calcolandone il movimento. Questo approccio basato sulla corrispondenza delle caratteristiche funziona bene, in parte perché caratteristiche come segmenti di muro e pilastri sono altamente distintivi, in termini di dimensione e angolo specifici di ciascuno. Ciò significa che ANT li identifica facilmente e li abbina con successo.
Al contrario, la maggior parte delle altre forme di navigazione naturale funzionano utilizzando misure laser (cioè punti rilevati dal laser). Questi vengono memorizzati in una mappa a griglia e utilizzati per abbinare le misurazioni del laser di un veicolo durante il funzionamento (il cosiddetto “scan matching”).
In altre parole, ANT lavora a un livello di astrazione più elevato: invece di lavorare a livello di misure laser (punti), lavora a livello di strutture (muri, pilastri ecc.). Ciò rende il processo di corrispondenza di ANT e la sua mappa più affidabili e forti in caso di ambiente dai cambiamenti dinamici. Poiché non ci sono oggetti temporanei da mappare, ricorda questi vengono rimossi dalla mappa durante la messa in servizio, si elimina un potenziale contributore di errori di posizionamento composti. Se le “caratteristiche naturali” permanenti utilizzate per il posizionamento del veicolo non cambiano, non c’è motivo per cui l’accuratezza delle operazioni di un veicolo guidato da ANT diminuisca.
Quando il nostro team BlueBotics si rivolge ai clienti di lunga data condividendo analisi e test riferite a diverse tecnologie di guida AGV, l’affidabilitàdi ANT è la ragione per cui molti danno scelgono o confermano BlueBotics come partner di navigazione d’elezione.

MITO 3: EVITARE GLI OSTACOLI SI TRADUCE SEMPRE IN MAGGIORE EFFICIENZA
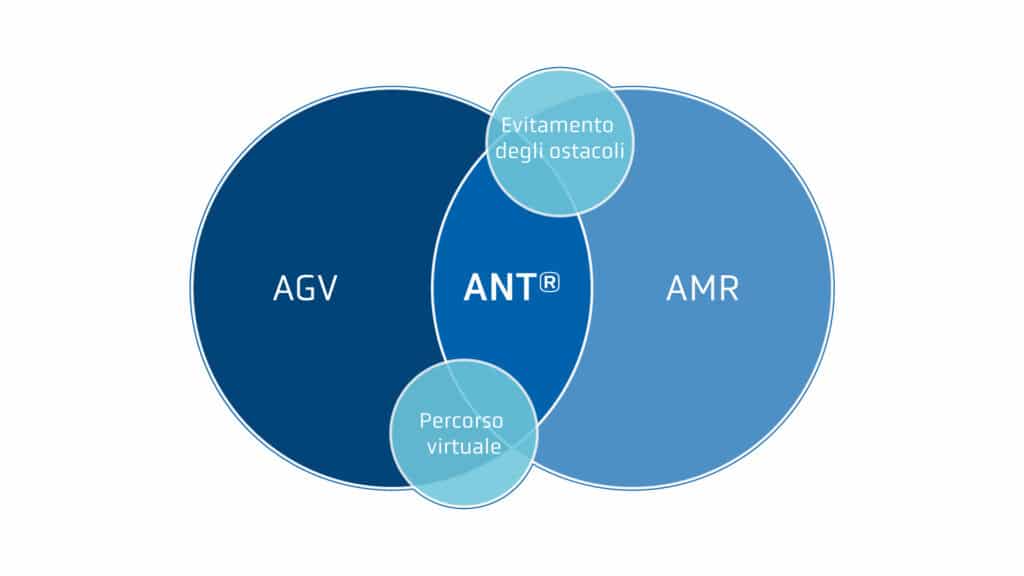
SFATATO: l’evitamento degli ostacoli è adatto ad alcune operazioni, ma il percorso virtuale è spesso (controintuitivamente) più efficiente.
Quando si tratta di muoversi in modo autonomo in un ambiente, gli AGV e gli AMR guidati dalla navigazione delle caratteristiche naturali tendono a utilizzare una delle due modalità:
- percorso virtuale: il veicolo si ferma quando un ostacolo ne blocca il percorso assegnato, o
- Evitamento degli ostacoli: il veicolo si spsota in maniera dinamica aggirando qualsiasi ostacolo prima di cercare di ritrovare il più rapidamente possibile il percorso assegnato.
La navigazione ANT offre entrambi gli approcci, ma qual è il più efficiente? Dipende dall’applicazione.
I robot di servizio come le lavasciuga pavimenti robotiche Cleanfix, invce, devono coprire ogni centimetro di terreno in un’area definita, ma l’ordine in cui lo coprono non è così importante. Inoltre, nei luoghi in cui lavorano, come i centri commerciali, ci sono molti ostacoli, non da ultimo gli avventori. In questi casi, un approccio basato sull’aggiramento degli ostacoli è l’ideale.
Tuttavia, nelle applicazioni industriali in cui gli AGV vengono utilizzati per automatizzare le attività di movimentazione dei materiali, l’approccio più efficiente, anche se può sembrare strano, è quello “stop and wait” utilizzato dal percorso virtuale.
Il CEO di BlueBotics, il dottor Nicola Tomatis, spiega: “Anche quando gli ostacoli vengono aggirati in maniera perfetta, se i tuoi AGV o AMR devono spostarsi intorno agli oggetti, ciò rallenta il loro progresso rispetto ai follower del percorso, dove il personale è formato e preparato per i percorsi sgombri”.
Inoltre, l’evitamento completo degli ostacoli rende quasi impossibile la gestione ottimale del traffico, il che significa che le prestazioni di un’intera flotta potrebbero vedersi fortemente compromesse dalla necessità di evitare gli ostacoli.
Il dott. Tomatis affermaa: “Consideriamo il feedback che abbiamo ricevuto di recente da un cliente, un produttore di AGV nordamericano. Uno dei suoi clienti, un produttore di pneumatici, gestiva in precedenza una flotta di 37 AGV, tutti impostati per evitare gli ostacoli. Quando la società ha deciso di aggiornare questi veicoli, tuttavia, ha optato per la navigazione ANT, che segue il percorso unitamente al software di gestione della flotta di server ANT. Ciò ha consentito all’azienda di pneumatici di installare complessivamente sette AGV in meno, in quanto i 30 attualmente in uso hanno dimostrato di essere il 10% più produttivi rispetto ai 37 precedenti. Quando si tratta di efficienza complessiva, questa è la differenza che si ha con un approccio basato sul seguimento del percorso “.
> Correlati: evitare gli ostacoli per gli AGV – Caratteristica da sogno o espediente pericoloso?
MITO 4: GLI SCANNER DI NAVIGAZIONE SONO LA PRIMA SCELTA
SFATATO: ANT tipicamente si avvale di uno o più scanner laser di sicurezza esistenti sul veicolo e posizionati sulla sua base.
Alcuni AGV che utilizzano la tecnologia di navigazione naturale impiegano uno scanner laser LiDAR dedicato. Questo sensore è solitamente posizionato in alto sul veicolo in modo che possa “vedere” il più possibile l’ambiente.
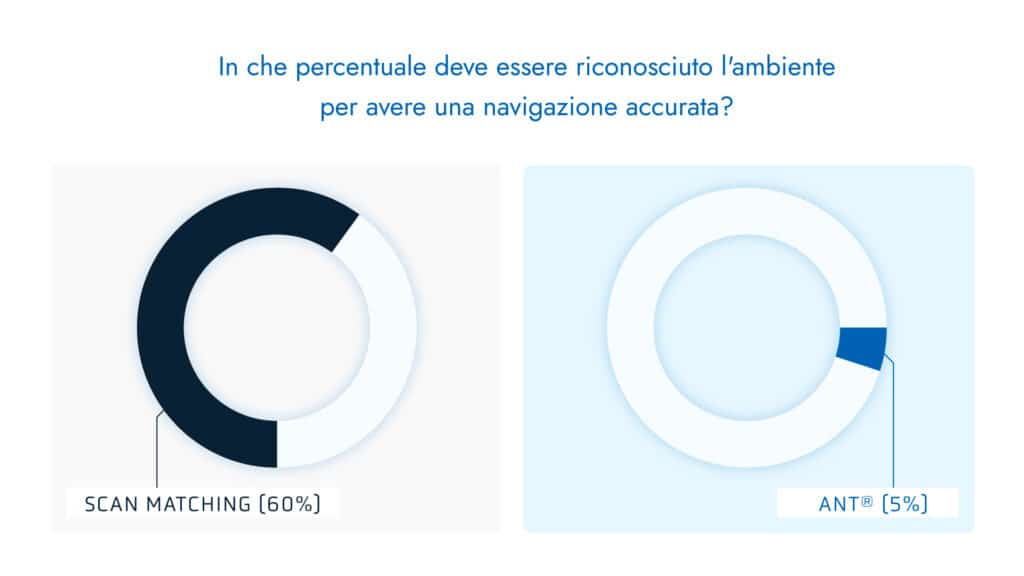
La posizione del sensore di solito indica che un sistema di navigazione naturale utilizza una metodologia di “corrispondenza della scansione” piuttosto che un approccio di “corrispondenza delle caratteristiche” (vedere Mito 2). Poiché la corrispondenza della scansione in genere richiede l’identificazione di circa il 60% delle funzionalità di un sito per funzionare bene, è molto sensato posizionare uno scanner in alto sul veicolo, in quanto in tale posizione può semplicemente vedere meglio il sito rispetto a quando installato all’altezza del pavimento.
Tuttavia, con la funzione di navigazione naturale ANT questa posizione elevata dello scanner non è richiesta.
Con ANT, la posizione di un veicolo nella mappa del sito viene determinata utilizzando una combinazione di corrispondenza delle caratteristiche (corrispondenza tra i riferimenti della mappa permanente e i dati dello scanner laser del veicolo) e odometria, utilizzata per misurare il cambiamento di posizione del veicolo calcolandone il movimento. In quanto tale, ANT deve solo “vedere” a intermittenza alcuni riferimenti ambientali, muri, colonne e così via,- per una precisa localizzazione del veicolo.
Invece di necessitare del 60% dei riferimenti richiesti dai sistemi di corrispondenza della scansione, ANT funziona con un alto grado di precisione anche quando gli scanner di un veicolo riescono “vedere” solo il 5%, o anche meno,- dell’ambiente. Infatti, un veicolo continuerà a muoversi lungo il suo percorso anche se per alcuni secondi non viene riconosciuta alcuna caratteristica. L’utilizzo di laser di sicurezza esistenti di un veicolo per il posizionamento, anche se montati in basso e con una visibilità relativamente limitata, non rappresenta un problema.
In sintesi, posizionare gli scanner di navigazione in alto sui veicoli è utile, ma solo per i sistemi che richiedono un alto livello di riferimenti per poter funzionare in modo efficiente. Anche nel caso di ANT è fattibile, ma non è realmente necessario.
Ulteriori vantaggi dell’utilizzo di laser scanner di sicurezza per il posizionamento dei veicoli
1. Poiché utilizza i dati degli scanner laser di sicurezza di un veicolo, la navigazione con funzioni naturali ANT si adatta a ogni tipo di fattore di forma del veicolo. Al contrario, se un veicolo utilizza la corrispondenza della scansione per il posizionamento e quindi ha bisogno che il suo scanner di navigazione sia posizionato in alto, ciò significa che non è possibile sviluppare AGV di tipo “anti-ribaltamento” (alias “mouse”).
2. Utilizzare gli scanner di sicurezza esistenti di un veicolo, invece di uno scanner di navigazione separato, significa che il produttore deve acquistare e integrare un componente in meno. Di riflesso, si traduce anche in un potenziale guasto in meno.
MITO 5: I VEICOLI A GUIDA ANT NON POSSONO NAVIGARE ALL’APERTO
SFATATO: i veicoli guidati da ANT possono navigare all’aperto e lo fanno.
Il funzionamento degli AGV all’aperto è stato tradizionalmente una vera sfida. La maggior parte delle aree esterne è priva di elementi naturali. In passato, ciò rendeva difficile calcolare la posizione del veicolo, rendendo necessaria l’aggiunta di ulteriori infrastrutture.
L’estensione del nostro prodotto, ANT everywhere, risponde a questa sfida aggiungendo il GNSS ad alta precisione come fonte di dati supplementare con cui calcolare la posizione del veicolo.
Il risultato è che le operazioni degli AGV all’aperto possono essere semplici, robuste e precise come quelle all’interno.
MITO 6: ANT È PER AGV, NON AMRS
SFATATO: sia gli AGV che gli AMR possono essere, e sono, pilotati da ANT.
Secondo lo standard di sicurezza per i robot mobili industriali, Requisiti di sicurezza ANSI / RIA R15.08-1-2020 (R15.08), “La differenza fondamentale tra AGV e AMR è caratterizzata dal modo in cui attraversano l’ambiente operativo specificato. Un AGV attraversa l’ambiente operativo specificato automaticamente lungo percorsi di guida predefiniti (virtuali o fisici) utilizzando la modalità di aggiramento degli ostacoli, “mentre lo standard definisce gli AMR come in grado di” attraversare l’ambiente operativo specificato rilevando gli ostacoli mediante sensori e regolando i percorsi mediante il calcolo di un percorso privo di ostacoli nello spazio libero anziché utilizzare un percorso predefinito. “
Quindi quale tipo di veicolo automatizzato è adatto alla navigazione ANT? La risposta è entrambi. Poiché ANT offre sia la modalità basata sul seguimento del percorso virtuale (ovvero percorsi guida) e di evitamento degli ostacoli, può adattare la propria guida.
Per illustrare la compatibilità di ANT con queste due modalità di navigazione, il video mette a confronto una flotta mista di AGV di marche diverse (che utilizzano la modalità percorso virtuale) e BlueBotics AMR (che utilizza la funzione di evitamento degli ostacoli). Tutti questi veicoli sono gestiti dal software server BlueBotics ANT nell’ambito di un unico progetto.
MITO 7: ANT DEVE VEDERE TUTTO L’AMBIENTE, TUTTO IL TEMPO.
SFATATO: Anche con riferimenti minimi visibili, i veicoli guidati da ANT hanno prestazioni
Un’idea sbagliata comune è che ogni tipo di sistema di navigazione debba essere in grado di vedere o identificare continuamente numerosi riferimenti nell’ambiente, affinché un veicolo possa calcolare con precisione la propria posizione.
Questo vale per alcune tecnologie di navigazione, ma non per ANT.
Un veicolo guidato da ANT è in grado di calcolare la propria posizione anche se sono visibili pochi elementi ambientali. Uno dei motivi è che, nell’algoritmo di posizionamento del sistema, i dati del laser scanner sono integrati da una robusta odometria, che calcola la velocità e la posizione del veicolo. Di conseguenza, se uno o più oggetti – ad esempio un altro veicolo – bloccano la linea di vista del laser scanner su diversi riferimenti, ciò non costituisce un problema. In effetti, è incredibilmente raro che un veicolo guidato da ANT si fermi e si “perda”, poiché un veicolo può funzionare efficacemente anche se è visibile meno del 5% dei riferimenti ambientali utilizzati per il posizionamento.
Al contrario, i sistemi di navigazione basati su SLAM devono vedere molti più riferimenti per posizionare o “localizzare” un AGV nella mappa (vedi mito 1). Le tecnologie di triangolazione laser (talvolta chiamate veicoli a guida laser o LGV) si basano invece sull’accesso diretto in linea di vista ad almeno tre bersagli riflettenti alla volta per poter funzionare.
In questo articolo, abbiamo sfatato i miti più comuni sulla navigazione naturale ANT di BlueBotics. Se hai altre domande su come ANT si comporta in caso di modalità basata su corrispondenza della scansione o navigazione SLAM continua, guarda il nostro webinar, Paths to Success. Oppure, contatta il nostro team di esperti sarà lieto di aiutarti.
_integrated_into_the_vehicle")
Cominciamo
Fai il primo passo verso l’automatizzazione del tuo veicolo.
Entra in contatto con il nostro team di esperti oggi stesso.