Comment Installer Un Véhicule Piloté Par ANT En 5 Étapes
« Les véhicules pilotés par ANT peuvent être installés en quelques jours, et non en quelques semaines. » C’est ce qu’on peut lire sur ce site Internet. Mais le processus d’installation des AGV, AMR et chariots élévateurs guidage automatique pilotés par la navigation ANT est sûrement plus complexe que cela ?
L’affirmation ci-dessus n’est pas exagérée. Avec une préparation adéquate (voir ci-dessous), votre entreprise pourra réaliser l’installation de son véhicule piloté par ANT sur le site d’un client en quelques jours seulement.
Dans cet article, nous expliquons chacune des 5 étapes clés de l’installation de tout type de robot mobile piloté par la navigation par caractéristiques naturelles ANT.
Mais avant de nous plonger dans ces étapes, parlons de la phase de préparation, si importante…
Pré-installation : la préparation est essentielle
Afin d’optimiser le succès de votre installation de véhicules automatisés, notre équipe d’experts recommande trois activités clés.
1. Normaliser le siteStandardize
Les processus de manutention manuelle d’aujourd’hui ne peuvent pas toujours être automatisés « tels quels ». Une certaine adaptation est souvent nécessaire. Veillez donc à bien analyser, simplifier et normaliser vos processus avant d’introduire la robotique mobile.
2. Simuler
La simulation préalable d’un projet AGV peut présenter un avantage considérable. Elle permet d’aplanir les problèmes potentiels (tels que les principales zones de circulation) et de définir le nombre exact de véhicules dont le client aura besoin (remarque : une bonne règle générale est qu’il faut 1,4 véhicule automatisé pour remplacer un camion conduit par un humain).
Un « jumeau numérique » du site de votre client peut être créé à l’aide d’un logiciel de CAO (ce jumeau est généralement extrait des plans du bâtiment). En utilisant en tandem le laboratoire ANT et le serveur ANT, vous pouvez ensuite faire circuler des véhicules virtuels dans ce projet simulé.
3. Préparer et impliquer
- Réduire le stress et le ressentiment du personnel en communiquant clairement et à l’avance sur le programme de robotique mobile de l’entreprise et les avantages qu’il apportera.
- Informer le personnel du calendrier et de la manière dont le processus de mise en service des véhicules se déroulera.
- Veiller à ce que le personnel qui conduira les véhicules automatisés soit bien adapté au travail et bien formé. (Veiller également à ce que plus d’un membre de l’équipe reçoive cette formation importante, car si le premier venait à quitter l’entreprise, ou à tomber malade, le succès de l’ensemble du programme AGV/AMR pourrait être mis en péril).
> Article connexe : 7 conseils pour assurer la réussite de la mise en service des AGV
Installer un AGV/AMR piloté par ANT en 5 étapes
Visionnez le bref guide vidéo ci-dessous ou continuez à défiler pour une explication plus détaillée :
Étape 1 – Étalonner votre AGV/AMR
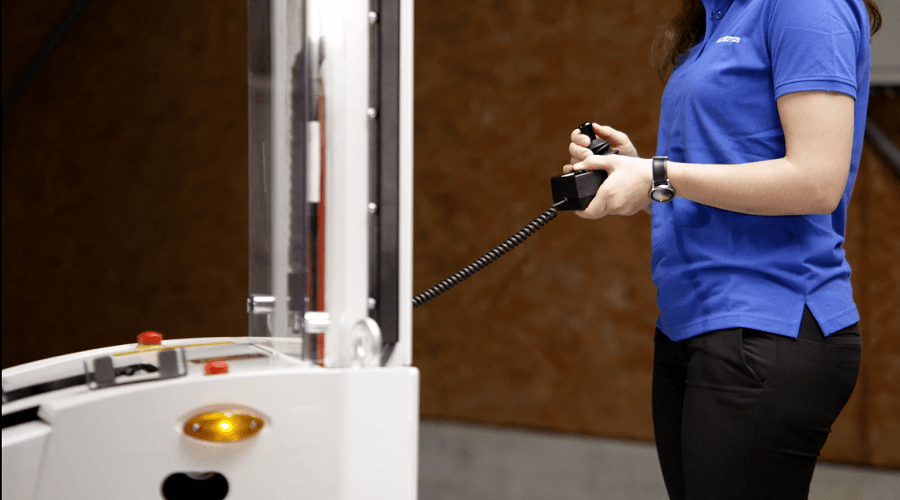
Lorsque votre véhicule piloté par ANT arrive sur le site de votre client, la première tâche de votre équipe sera de vérifier que son système de navigation ANT comprend bien les paramètres spécifiques de votre véhicule.

Cette étape est importante car les composants d’un véhicule – tels que ses scanners laser LiDAR, utilisés par ANT pour le positionnement – peuvent facilement être désalignés pendant le transport. Un véhicule bien calibré est beaucoup moins susceptible de rencontrer des problèmes par la suite, car les véhicules mal calibrés risquent de ne pas naviguer avec précision (sans que la raison en soit immédiatement claire, ce qui entraîne un processus de diagnostic frustrant).
Le processus d’étalonnage est simple et comporte deux étapes principales :
- Le réglage manuel du plan laser des scanners laser de votre véhicule.
- L’étalonnage automatique de la géométrie de votre véhicule à l’aide de l’assistant de configuration intégré à ANT lab.
Le processus d’étalonnage du véhicule est couvert en détail dans l’une de nos vidéos tutorielles BlueBotics, sans oublier notre documentation technique, toutes disponibles sur notre portail d’assistance spécialisé.
Étape 2 – Créer une carte du site
Pour créer la carte du site de votre client que vos véhicules utiliseront pour se déplacer, vous devez d’abord conduire votre véhicule manuellement autour du site. Dans le cas d’un chariot élévateur automatisé, il s’agira de conduire ce véhicule hybride normalement, en utilisant son volant. Mais dans le cas d’un AGV ou AMR (c’est-à-dire un véhicule sans mode hybride), le robot sera contrôlé à l’aide d’une manette filaire. Cette manette est fournie avec votre première livraison de matériel ANT.
Pendant que votre véhicule se déplace sur le site, les données de ses scanners laser LiDAR – c’est-à-dire tout ce que ces composants « voient » pendant le trajet – sont enregistrées. Ces données sont ensuite importées dans votre logiciel de configuration ANT lab et transformées en une carte brute du site. À ce stade, cette carte contient non seulement les murs et les caractéristiques permanentes de votre site (qui seront utilisés pour la navigation), mais aussi d’autres objets temporaires ou « dynamiques » que les scanners ont « vus », comme des palettes, des personnes, d’autres véhicules, etc. Ne vous inquiétez pas, nous supprimerons ces objets inutiles sous peu.
Étape 3 – Nettoyer le plan du site
Ensuite, la carte est « nettoyée » dans ANT lab. L’objectif ici est de ne garder que ce qui est important. Les objets et caractéristiques temporaires peuvent être supprimés, ne laissant que les caractéristiques permanentes et statiques – comme les murs, les piliers, les machines fixes, etc. – dont ANT a besoin pour calculer la position de votre véhicule et naviguer avec précision.
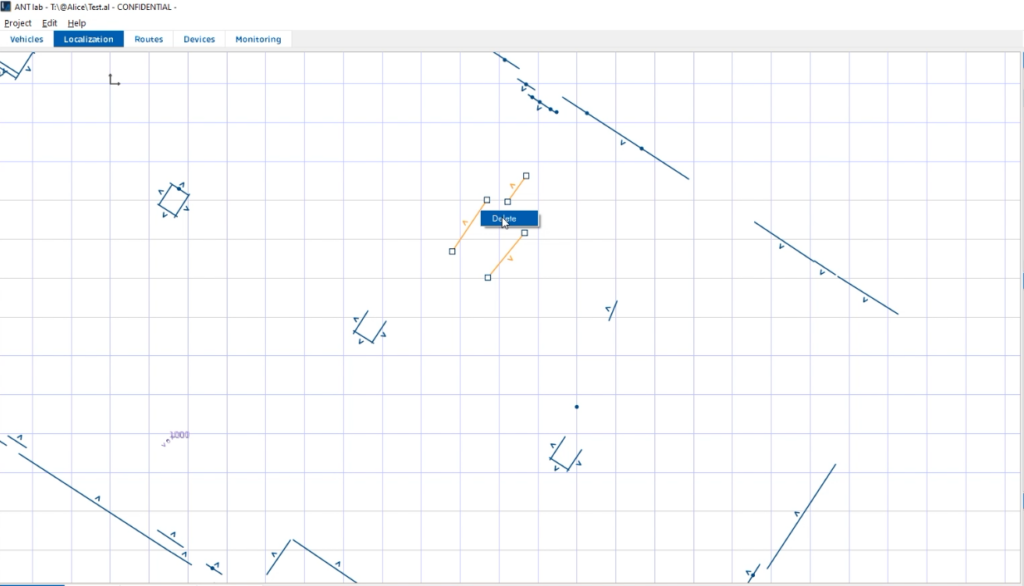
Cette approche, qui consiste à n’utiliser que des références permanentes, garantit que votre véhicule fonctionnera comme prévu, à chaque fois. Et à moins que des changements importants ne soient apportés à la structure permanente du bâtiment ou du hall, la carte que vous avez créée ne devra jamais être modifiée.
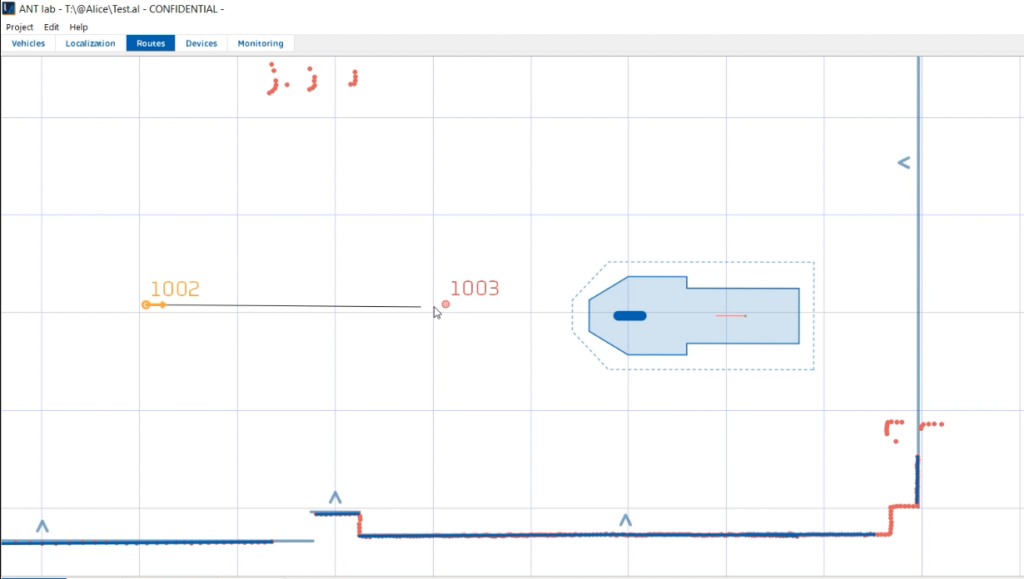
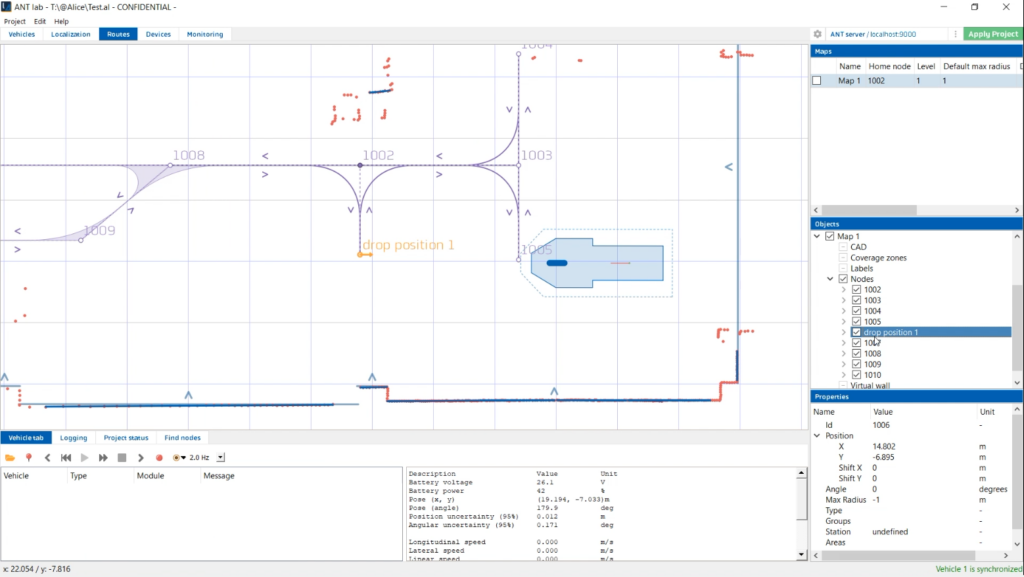
Étape 4 – Créer les itinéraires de votre véhicule
Maintenant que vos véhicules sont prêts à rouler et que votre carte du site est propre, vous pouvez tracer les itinéraires, les chemins virtuels, que vos robots utiliseront pour se déplacer, à l’aide de notre logiciel ANT lab fourni.
Ce processus est simple grâce à l’interface graphique de ANT lab. Tout d’abord, nous créons des « nœuds ». Ensuite, nous les relions avec des « liens ». Chaque lien peut être défini comme unidirectionnel (c’est-à-dire qu’un véhicule peut voyager le long de cette section de itinéraire dans une seule direction) ou bidirectionnel (les deux directions sont possibles). Facile.
Étape 5 – Créer les actions de votre véhicule
Une action est une tâche unique qui est programmée pour se produire à l’emplacement d’un nœud. Par exemple, les actions peuvent être utilisées pour :
- Modifier le comportement d’un véhicule (par exemple, ralentir le camion).
- Activer les sous-systèmes d’un véhicule (par exemple, abaisser ou relever les fourches d’un engin à fourche).
- Permettre au véhicule d’interfacer avec les machines sur le site, telles que les portes automatiques, les ascenseurs, les palettiseurs, les convoyeurs, etc.
- Des actions personnalisées sont également disponibles.
La durée de cette étape peut varier considérablement, en fonction de l’exploitation souhaitée de l’AGV/AMR en question. Cependant, une grande partie de ce travail peut généralement être effectuée avant d’arriver sur le site du client. En avançant le travail de cette manière, on peut gagner des jours de temps sur le site.
N’oubliez pas !
Lorsque vous vous associez à BlueBotics, un ingénieur système BlueBotics expérimenté se rendra avec vous à votre première installation client pour assurer le succès de ce projet et former votre personnel. Pour garantir que votre équipe soit toujours au courant des meilleures pratiques ANT et des dernières mises à jour de nos logiciels, nous fournissons également une grande quantité de documentation technique supplémentaire, de tutoriels vidéo, de contenus de webinaires et plus encore sur notre portail d’assistance spécialisé.

Prêt à commencer ?
Franchissez la prochaine étape de votre voyage d’automatisation. Découvrez la navigation ANT, ou prenez contact avec notre équipe d’experts en automatisation.
_integrated_into_the_vehicle")
Commençons
Faites le premier pas vers l'automatisation de votre véhicule.
Planifiez un appel avec notre équipe d'experts dès aujourd'hui.