Installation Eines ANT-Gesteuerten Fahrzeugs In 5 Schritten
„ANT-gesteuerte Fahrzeuge lassen sich innerhalb von Tagen anstatt Wochen, installieren“. So heißt es auf dieser Website. Aber ist der Prozess der Installation von FTS, FMS und automatisierten Gabelstaplern mit ANT-Navigation nicht viel komplexer als das?
Die obige Behauptung ist tatsächlich keine Übertreibung. Mit der richtigen Vorbereitung(siehe unten) kann die Installation des ANT-Fahrzeugs Ihres Unternehmens am Kundenstandort innerhalb weniger Tage abgeschlossen sein.
In diesem Artikel erläutern wir die 5 wichtigsten Schritte bei der Installation eines mobilen Roboters, der von ANT-Konturnavigation (Natural Feature Navigation) gesteuert wird.
Doch bevor wir uns mit diesen Schritten befassen, sollten wir über die so wichtige Vorbereitungsphase sprechen …
Vor der Installation: Vorbereitung ist alles
Um den Erfolg Ihrer Installation eines automatisierten Fahrzeugs zu optimieren, empfiehlt unser Expertenteam drei wichtige Maßnahmen.
1. Standardisierung
Heutige manuelle Prozesse des Materialtransports lassen sich nicht immer einfach so im Istzustand automatisieren. Häufig ist eine Anpassung erforderlich. Daher sollten Sie Ihre Prozesse sorgfältig analysieren, vereinfachen und standardisieren, bevor Sie mobile Roboter einsetzen.
2. Simulation
Die Simulation eines FTS-Projekts im Vorfeld kann ein großer Vorteil sein. Sie kann dazu beitragen, potenzielle Probleme (z. B. Verkehrsengpässe) zu beseitigen, und Ihnen helfen, genau zu bestimmen, wie viele Fahrzeuge Ihr Kunde benötigt (Hinweis: nach einer Faustregel ersetzen 1,4 automatisierte Fahrzeuge ein von Menschen gesteuertes Fahrzeug).
Ein „digitaler Zwilling“ des Standorts Ihres Kunden kann mit CAD-Software erstellt werden (dieser Zwilling wird normalerweise aus den Bauplänen extrahiert). Mit ANT lab und ANT server können Sie dann virtuelle Fahrzeuge durch dieses simulierte Projekt fahren lassen.
3. Vorbereitung und Einbindung
- Minimieren Sie Stress und Unmut bei den Beschäftigten, indem Sie sie frühzeitig und klar über das Unternehmensprogramm für mobile Robotik und die damit verbundenen Vorteile informieren.
- Informieren Sie die Beschäftigten, wann und wie die Inbetriebnahme des Fahrzeugs erfolgen wird.
- Stellen Sie sicher, dass die Beschäftigten, die die automatisierten Fahrzeuge bedienen werden, für diese Aufgabe geeignet sind, und bilden Sie sie gut aus. (Achten Sie auch darauf, dass mehr als ein Teammitglied diese wichtige Ausbildung erhält, denn wenn das erste das Unternehmen verlässt oder krank wird, könnte der Erfolg des gesamten FTS/AMR-Programms gefährdet sein).
> Auch interessant: 7 Tipps für eine erfolgreiche FTS-Inbetriebnahme
Installation eines ANT-gesteuerten FTS/AMR in 5 Schritten
Sehen Sie sich die kurze Videoanleitung unten an oder scrollen Sie weiter, um eine ausführlichere Erklärung zu erhalten:
Schritt 1: Kalibrieren Sie Ihr FTS/AMR
Wenn Ihr ANT-gesteuertes Fahrzeug beim Kunden eintrifft, besteht die erste Aufgabe Ihres Teams darin, sicherzustellen, dass das ANT-Navigationssystem die spezifischen Parameter Ihres Fahrzeugs richtig versteht.

Dieser Schritt ist wichtig, da die Komponenten eines Fahrzeugs – wie z. B. die LiDAR-Laserscanner, die von ANT für die Lokalisierung verwendet werden – während des Transports leicht verstellt werden können. Bei einem gut kalibrierten Fahrzeug sind spätere Probleme viel unwahrscheinlicher. Mangelhaft kalibrierte Fahrzeuge navigieren möglicherweise nicht genau (und der Grund dafür ist möglicherweise nicht sofort klar, was zu einer frustrierenden Fehlersuche führt).
Der Kalibrierungsprozess ist unkompliziert und umfasst zwei wichtige Schritte:
- Manuelle Einstellung der Laserebene der Laserscanner in Ihrem Fahrzeug.
- Automatische Kalibrierung der Fahrzeuggeometrie mit dem integrierten Konfigurationsassistenten von ANT lab.
Der Prozess der Fahrzeugkalibrierung wird in einem unserer BlueBotics-Tutorialvideos ausführlich behandelt – nicht zu vergessen unsere technische Dokumentation, beides auf unserem speziellen Support-Portal verfügbar.
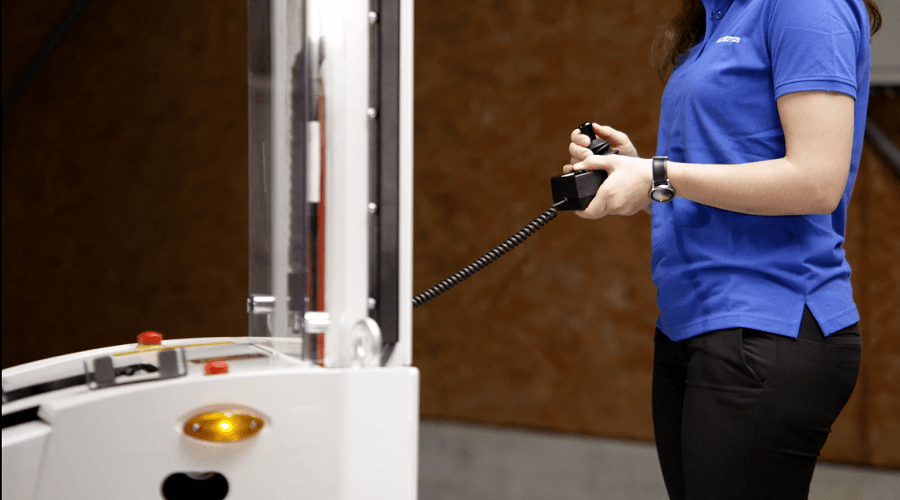
Schritt 2: Erstellen Sie einen Standort-Grundriss
Um den Grundriss des Kundengeländes zu erstellen, auf der sich Ihr(e) Fahrzeug(e) bewegen werden, müssen Sie Ihr Fahrzeug zunächst manuell durch den Standort fahren. Im Falle eines automatisierten Gabelstaplers bedeutet dies, dass Sie dieses Hybridfahrzeug ganz normal manuell lenken. Im Falle eines FTS oder AMR (d. h. eines Fahrzeugs ohne Hybridmodus) wird dieser Roboter jedoch mit einem kabelgebundenen Joystick gesteuert. Dieser Joystick wird mit Ihrer ersten ANT-Hardware geliefert.
Während sich Ihr Fahrzeug durch den Standort bewegt, werden Daten von seinen LiDAR-Laserscannern aufgezeichnet – praktisch alles, was diese Komponenten während der Fahrt „sehen“. Diese Daten werden dann in Ihre ANT lab Konfigurationssoftware importiert und in einen vorläufige Standortkarte umgewandelt. In diesem Stadium enthält die Karte nicht nur die Wände und permanenten Merkmale Ihres Standorts (die für die Navigation verwendet werden), sondern auch andere temporäre oder „dynamische“ Objekte, die die Scanner „gesehen“ haben, wie z. B. Paletten, Personen, andere Fahrzeuge usw. Keine Sorge: wir werden diese überflüssigen Objekte gleich entfernen.
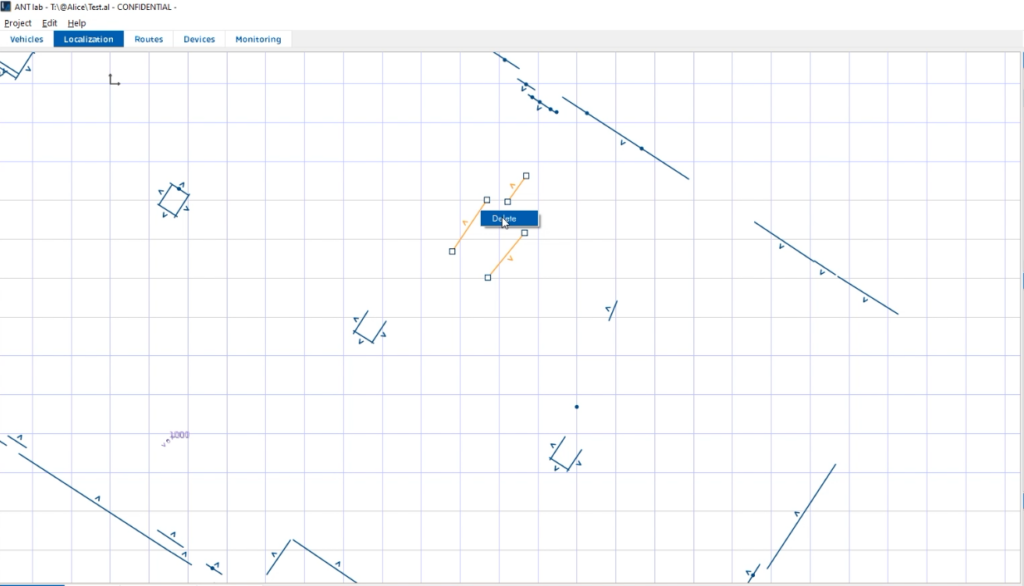
Schritt 3: Bereinigen Sie die Standortkarte
Anschließend wird die Karte in ANT lab „bereinigt“. Hier geht es darum, nur die wichtigen Informationen zu behalten. Temporäre Objekte und Merkmale können entfernt werden, sodass nur die permanenten, ortsunveränderlichen Merkmale übrig bleiben – wie Wände, Säulen, festmontierte Maschinen usw. – die ANT benötigt, um die Position Ihres Fahrzeugs zu berechnen und genau zu navigieren.
Das Konzept, nur permanente Bezugspunkte zu verwenden, gewährleistet, dass sich Ihr Fahrzeug dauerhaft wie erwartet verhält. Solange es keine wesentlichen baulichen Änderungen am Gebäude oder an der Halle gibt, muss die von Ihnen erstellte Karte also nie geändert werden.
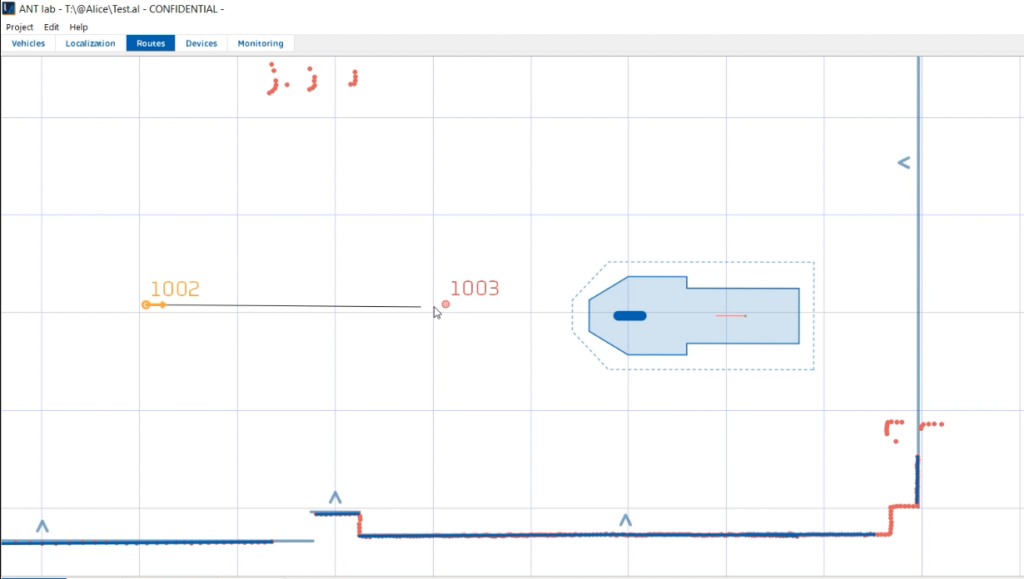
Schritt 4: Erstellen Sie die Strecken für Ihr Fahrzeug
Jetzt, da Ihre Fahrzeuge einsatzbereit sind und Ihre Karte bereinigt ist, können Sie die virtuellen Strecken, auf denen sich Ihre Roboter fortbewegen sollen, mit unserer mitgelieferten ANT lab Software planen.
Dieser Prozess ist mit der grafischen Benutzeroberfläche von ANT lab sehr einfach. Zuerst erstellen wir „Knoten“, die wir dann mit „Verbindungen“ verbinden. Eine Verbindung selbst kann entweder als unidirektional (d. h. ein Fahrzeug kann diesen Streckenabschnitt nur in eine Richtung befahren) oder als bidirektional (beide Richtungen sind möglich) eingestellt werden. Einfach.
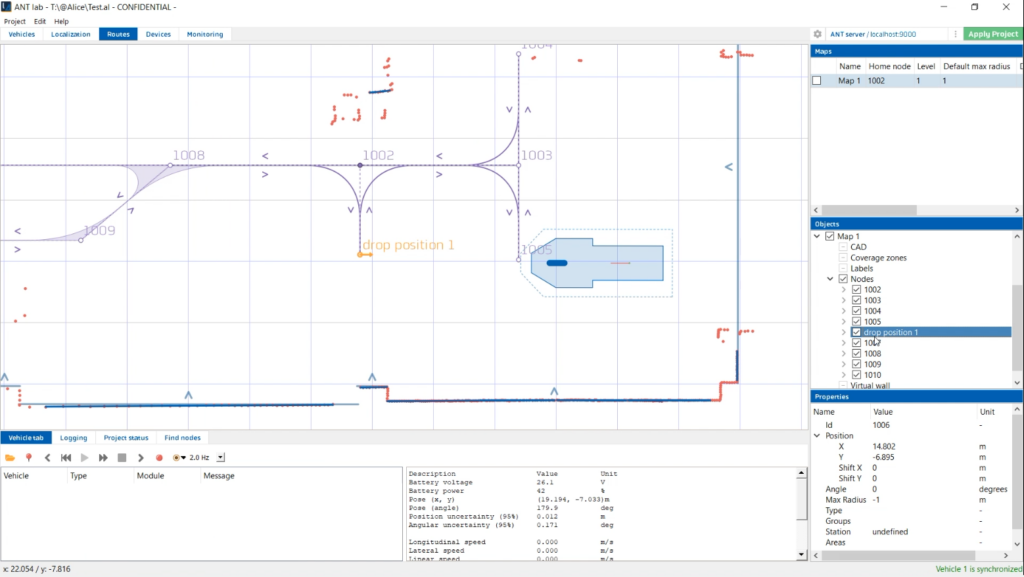
Schritt 5: Erstellen Sie die Aktionen für Ihr Fahrzeug
Eine Aktion ist eine einzelne Aufgabe, die so programmiert ist, dass sie am Ort eines Knotens ausgeführt wird. Aktionen können zum Beispiel verwendet werden, um:
- das Verhalten eines Fahrzeugs zu ändern (z. B. abbremsen).
- die Teilsysteme eines Fahrzeugs zu aktivieren (z. B. absenken oder anheben der Staplergabeln).
- die Interaktion des Fahrzeugs mit der vorhandenen Ausrüstung zu ermöglichen – z. B. mit automatischen Türen, Aufzügen, Palettierern, Förderanlagen usw.
- Außerdem sind benutzerdefinierte Aktionen verfügbar.
Die Dauer dieses Schritts kann sehr unterschiedlich sein, je nachdem, wie das betreffende FTS/AMR eingesetzt werden soll. Ein Großteil dieser Arbeit kann jedoch in der Regel bereits vor der Auslieferung am Kundenstandort erledigt werden. Die Vorverlagerung dieser Arbeiten kann vor Ort mehrere Tage einsparen.
Denken Sie daran:
Wenn Sie eine Partnerschaft mit BlueBotics eingehen, wird ein erfahrener BlueBotics-Systemingenieur Sie zu Ihrer ersten Kundeninstallation begleiten, um den Erfolg Ihres Projekts sicherzustellen und Ihr Personal zu schulen. Und damit Ihr Team immer auf dem neuesten Stand der ANT-bezogenen Best-Practices und unserer neuesten Software-Updates ist, stellen wir auf unserem speziellen Support-Portal zahlreiche zusätzliche technische Dokumentationen, Video-Tutorials, Webinar-Aufzeichnungen und mehr zur Verfügung.

Sind Sie bereit, loszulegen?
Machen Sie den nächsten Schritt auf Ihrem Weg zur Automatisierung. Entdecken Sie die ANT-Navigation oder nehmen Sie Kontakt mit unserem Team von Automatisierungsexperten auf.
_integrated_into_the_vehicle")
LOS GEHT'S
Machen Sie den ersten Schritt zur Automatisierung Ihres Fahrzeugs.
Vereinbaren Sie noch heute einen Anruf mit unserem Expertenteam.