La navigation naturelle expliquée : la mise en correspondance par scan et la mise en correspondance par éléments
La réussite ou l’échec des projets d’automatisation des véhicules dépend de la puissance de leur technologie de navigation. C’est pourquoi les technologies de navigation naturelle robustes et flexibles sont un choix populaire pour les entreprises qui automatisent les véhicules industriels.
Dans cet article, nous examinons la différence entre les deux principaux types de technologies de navigation naturelle (parfois appelée navigation libre) pour les AGV – la mise en correspondance par scan et la mise en correspondance par éléments – ainsi que leurs avantages et inconvénients respectifs.
DANS CET ARTICLE
- Quelle est la différence entre la mise en correspondance par scan et la mise en correspondance par éléments ?
- Un véhicule peut-il naviguer avec précision sans tout voir ?
- Où sont situés les scanners de navigation d’un AGV ?
- Une connexion Internet est-elle nécessaire pour les AGV utilisant la navigation naturelle ?
- Quelle mise en correspondance est plus précise : celle par scan ou celle par éléments ?
- Si un véhicule ignore les parties dynamiques de l’environnement, cela provoquera-t-il des collisions ?
- Quelle technologie de navigation naturelle choisir ?
Quelle est la différence entre la mise en correspondance par scan et la mise en correspondance par éléments ?
Pour faire simple, les technologies de navigation naturelle d’aujourd’hui utilisent deux méthodologies différentes : la mise en correspondance par scan (parfois appelée navigation SLAM) et la mise en correspondance par éléments (utilisée par ANT).
Comment fonctionne la mise en correspondance par scan
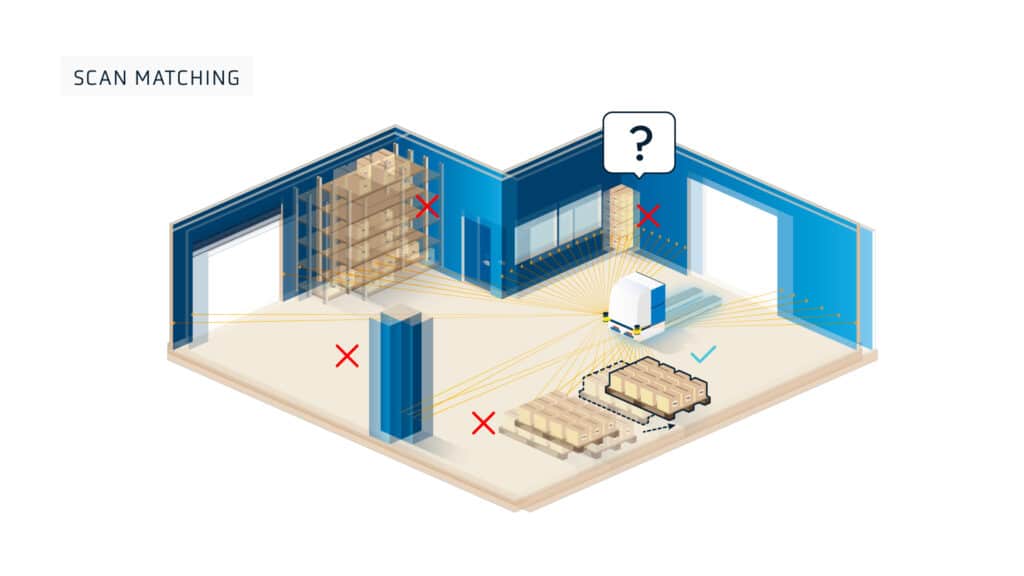
Avec la technologie de mise en correspondance par scan, les mesures des scanners laser du véhicule sont comparées (mises en correspondance) aux cellules d’une carte de référence en grille de l’environnement. Ces cellules rappellent les pixels d’une image numérique.
Pour se positionner (localiser) sur la carte, le système de navigation calcule la position du véhicule à l’aide des points mis en correspondance. En même temps, il utilise l’odométrie, qui mesure le changement de position du véhicule en calculant son mouvement. Dans de rares cas, un système de mise en correspondance par scan peut régulièrement mettre à jour la carte de référence en fonction de ce que « voit » le véhicule.


Comment fonctionne la mise en correspondance par éléments
Avec la technologie de mise en correspondance par éléments ANT, les mesures des scanners laser du véhicule sont comparées (mises en correspondance) à des références cartographiques permanentes (les éléments) telles que les murs et les piliers. Si une partie du site ne présente pas suffisamment d’éléments distinctifs, des autocollants réfléchissants peuvent également être ajoutés pour servir de références supplémentaires.
L’un des principaux avantages de la mise en correspondance par éléments, plutôt que par des points laser, est que les éléments sont très distinctifs en raison de leur taille et de leur angle spécifiques. Ils sont donc faciles à identifier et à faire correspondre par le système.
Pour localiser le véhicule sur la carte, ANT utilise ensuite un mélange d’odométrie et de mise en correspondance par éléments, en excluant de ses calculs tous les objets « dynamiques » non permanents (palettes, boîtes, personnes, etc.).
Comme la carte résultante ne contient que les coordonnées des éléments statiques et permanents, la taille du fichier est beaucoup plus petite que la carte en grille utilisée pour la mise en correspondance par scan.


Un véhicule peut-il naviguer avec précision sans tout voir ?
Les véhicules qui utilisent la technologie de mise en correspondance par éléments et ceux qui utilisent celle de mise en correspondance par scan doivent « voir » et faire correspondre les éléments de l’environnement pour se localiser avec précision.
Mais la proportion des éléments de l’environnement qu’ils doivent faire correspondre varie considérablement :
- La technologie de mise en correspondance par scan doit reconnaître au moins 60 % de l’environnement pour un positionnement précis.
- La technologie de mise en correspondance par éléments doit reconnaître jusqu’à 5 % de l’environnement pour un positionnement précis. En fait, même si aucun élément n’est mis en correspondance pendant plusieurs secondes, les véhicules pilotés par ANT peuvent naviguer efficacement sur quelques mètres grâce à leur utilisation de l’odométrie.
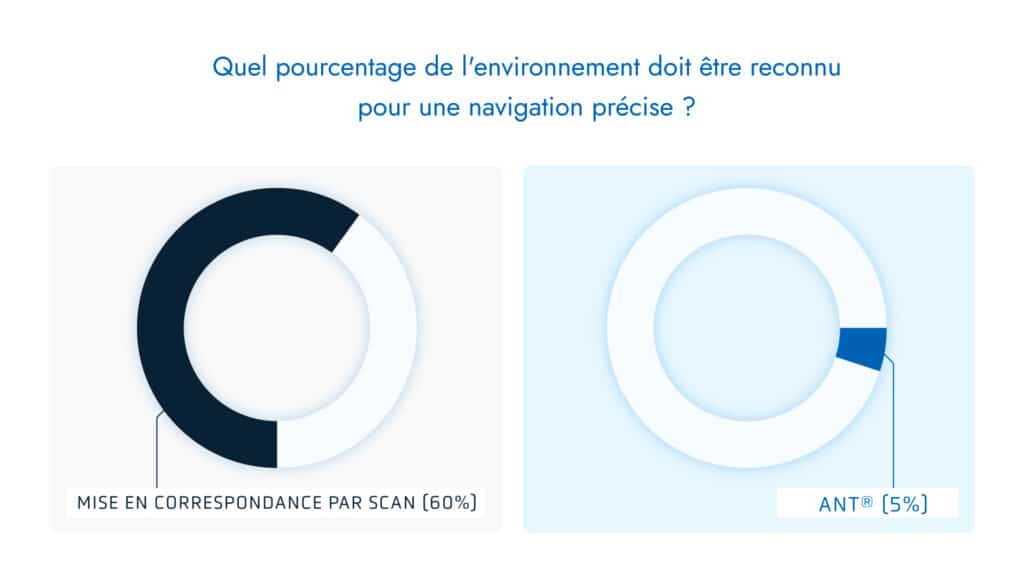
Par conséquent, les véhicules pilotés par ANT n’ont besoin de reconnaître qu’un petit pourcentage de l’environnement pour pouvoir naviguer efficacement.
Où sont situés les scanners de navigation d’un AGV?
La plupart des véhicules à mise en correspondance par éléments (pilotés par ANT) n’utilisent pas de scanner laser dédié à la navigation : ils s’appuient plutôt sur les scanners laser de sécurité intégrés, situés à la base du véhicule.
Les véhicules à mise en correspondance par éléments détecteront donc les objets inattendus, comme une nouvelle pile de palettes, et le système de sécurité évitera les collisions, mais ces objets dynamiques ne seront pas ajoutés à la carte du véhicule, comme indiqué ci-dessus.

En revanche, les véhicules qui utilisent la mise en correspondance par scan sont souvent équipés d’un scanner laser supplémentaire. Celui-ci est généralement positionné sur le toit du véhicule afin d’assurer la mise en correspondance du plus grand nombre de points de l’environnement possible.
Inconvénients de l’utilisation d’un scanner laser supplémentaire
- L’utilisation d’un scanner supplémentaire rajoute le coût du composant pour le fabricant du véhicule (et augmentera probablement le prix final pour l’acheteur du véhicule).
- Chaque pièce de matériel supplémentaire ajoute un point de défaillance potentiel de plus.
- Le fait de placer les scanners laser sur le dessus du véhicule limite également les types de véhicules qu’un producteur peut proposer sur le marché. Par exemple, l’utilisation d’un scanner séparé pour la navigation ne permet pas à un fabricant de véhicules de produire des AGV à hauteur réduite ou de type « souris », conçus pour se déplacer sous les chariots.
- Les lasers placés en hauteur sur le véhicule sont plus sensibles aux inclinaisons ou aux embardées causées par des surfaces inégales ou des pneus mous.

Une connexion internet est-elle nécessaire pour les agvs utilisant la navigation naturelle ?
Grâce à la mise en correspondance par éléments, la carte utilisée par un véhicule n’a jamais besoin d’être mise à jour à moins que les éléments permanents de l’environnement ne changent. Par conséquent, les véhicules pilotés par ANT n’ont pas besoin d’un accès Wifi puissant constant pour fonctionner. Les clients de BlueBotics signalent qu’un accès Wifi (ou Bluetooth ou autre communication sans fil) ponctuel sur le site est souvent suffisant. Une connectivité à faible bande passante n’est nécessaire que pour les interactions dirigées par le serveur, comme lorsque les véhicules communiquent avec le matériel (ascenseurs, portes automatiques), et pour le contrôle du trafic.
Par contraste, si un véhicule utilise une technologie de mise en correspondance par scan qui met régulièrement à jour la carte, cela nécessite une connectivité sans fil puissante et constante (ce qui n’est pas toujours le cas dans les entrepôts et les ateliers). En effet, chaque carte mise à jour doit être téléchargée par chaque véhicule de la flotte depuis un serveur central, idéalement en temps quasi réel. N’oubliez pas que ces cartes en grille extrêmement détaillées peuvent avoir une taille de fichier très importante.
Quelle mise en correspondance est plus précise : celle par scan ou celle par elements ?
Il n’est pas facile de garantir la répétabilité et la fiabilité des opérations d’un AGV en utilisant la navigation naturelle. Cependant, ANT y parvient régulièrement sur la durée, sans perdre en précision (environ ±1 cm / ±1°).
La précision de la localisation des véhicules de la mise en correspondance par scan est comparable à la taille de la cellule de sa carte de référence. Pour réduire la taille du fichier, les véhicules qui utilisent la mise en correspondance par scan réduisent souvent la taille de leur carte, créant ainsi des cellules de trois à dix centimètres. Ce n’est pas une limitation qui s’impose aux véhicules pilotés par ANT, car la carte de référence, qui ne contient que les éléments permanents, est un fichier plus petit et n’a pas besoin d’être rétrogradé.
De plus, comme la mise en correspondance par scan enregistre l’ensemble de l’environnement – à la recherche de correspondances – elle capture également les objets dynamiques qui peuvent se déplacer. Par exemple, des palettes peuvent être régulièrement placées dans une section donnée du quai de chargement. Si elles sont toujours placées exactement à la même position, avec une précision centimétrique, cela ne poserait aucun problème. Mais c’est rarement le cas. Par conséquent, si ces palettes sont placées quelques centimètres en dehors de l’alignement, le véhicule peut supposer qu’elles sont au bon endroit, et ajuster le reste de la carte en conséquence, ancrant la carte à ce placement incorrect et rendant tous les autres points de la carte inexacts.
Si un véhicule utilisant la navigation par mise en correspondance par scan met à jour la carte de référence avec des mesures qui sont intrinsèquement imprécises, ces erreurs seront transmises au serveur de gestion des véhicules du système et la carte mise à jour sera téléchargée vers le reste de la flotte, ce qui pourrait propager et aggraver l’erreur.
Dans ce même exemple, un véhicule piloté par ANT n’enregistrerait pas du tout l’emplacement des palettes. Il les ignorerait à moins qu’il ne reçoive l’instruction d’interagir avec elles.
Si un véhicule ignore les parties dynamiques de l’environnement, cela provoquera-t-il des collisions ?
>Articlé recommandé : Mythe – Éviter les obstacles est toujours plus efficace
Quelle technologie de navigation naturelle choisir ?
Chaque entreprise a des défis qui lui sont propres. Mais pour la facilité d’utilisation, la précision et la robustesse de fonctionnement, nous pensons que la navigation ANT est le choix évident pour tout type de véhicule.
Visionnez notre récent webinaire pour en savoir plus sur les autres technologies de navigation (notamment le filoguidage et le suivi de balises). Ou contactez-nous si vous avez des questions sur la façon dont ANT peut aider à développer votre entreprise.
_integrated_into_the_vehicle")
Commençons
Faites le premier pas vers l'automatisation de votre véhicule.
Planifiez un appel avec notre équipe d'experts dès aujourd'hui.
