 Skip to content
Skip to content这是SLAM导航吗? 7个ANT导航神话的破灭
自主导航可能会造成混乱。在这里,我们从SLAM问题开始,消除有关BlueBoticsANT导航技术的最普遍的神话…
误解1:ANT是漫游
无效:ANT自然特征导航在导航期间不使用SLAM。实际上,几乎没有自主导航解决方案使用SLAM进行导航。相反,大多数技术(包括ANT)仅使用SLAM来创建其初始站点地图。
为了打破这个神话,我们必须首先解释什么是SLAM导航。同步定位和地图绘制(SLAM)是一种算法方法,大多数类型的自然导航技术都使用它来构造环境地图。然后,自动导引车(AGV)使用此地图来计算其位置并在该环境中导航。
旁注:自然导航有时被称为“自由导航”,“无带导航”,或更令人困惑的是“ SLAM导航”。
借助自然导航技术,在大多数情况下,SLAM仅用于创建站点的初始参考地图。该过程在站点的第一个AGV的调试(安装)过程中进行。
但是,在极少数情况下(通过自然导航的某些“扫描匹配”版本),SLAM既可用于构建结构,又可定期更新基于网格的环境图。这种方法在准确性和可重复性方面提出了挑战,因为更新地图中结构的坐标将使确保稳定的设置极为困难,即使不是不可能。就现场所需的无线连接性而言,这种地图更新方法也要求很高,因为每次地图更新时,车队中的每辆车都必须从中央服务器实时地实时下载地图。
借助BlueBotics的自主导航技术(ANT),情况并非如此。在站点地图的初始创建过程中,SLAM仅使用一次。

ANT的地图创建过程如下:
- 要创建站点地图,集成商会在站点周围手动驾驶车辆,来自其安全激光扫描仪的数据将用于创建原始站点地图。为了确认,此特定过程确实使用SLAM。
- 然后,集成商使用BlueBotics的ANT实验室软件从地图上删除临时或动态对象(例如盒子,货盘,其他车辆等)。
- 结果是一个干净的地图,其中仅包含该站点的永久性特征,例如墙壁,支柱和固定的机械(以及由于环境中几乎没有“自然”特征而需要的反光贴纸)(如果需要的话)。
- 然后,集成商定义将哪些永久性特征用作参考。此后,ANT的软件会在执行任务时将这些参考与车辆的激光扫描仪数据进行匹配(又称特征匹配),从而使其能够准确计算车辆的位置,从而有效地导航。
由于仅使用原始的永久性特征作为参考来计算车辆的位置,因此可以保证随着时间的推移具有较高的精度-不会出现测量误差蔓延和复合的情况。该地图永远不会更新。它永远不会改变。
例如,2009年在意大利Dal Colle(Barilla Group)调试的Esatroll Paquito AGV是有史以来安装的第一个ANT驱动车辆,仍然使用其原始站点地图执行其任务!建筑物的永久结构没有变化,因此地图也不需要。
误区二:不可靠的自然导航
破产:ANT非常可靠且坚固。
让我们说清楚。使用自然特征导航来确保自动驾驶汽车操作的可重复性和可靠性绝非易事。但是,ANT会随着时间的推移反复实现这一目标,而不会降低准确性。
借助ANT导航,可以使用“特征匹配”(将地图中的永久参照与车辆的激光扫描仪数据进行匹配)和测距法来确定车辆在地图中的确切位置,用于通过计算车辆的运动来测量车辆的位置变化。特征匹配方法之所以行之有效,部分原因是,就每个部分的特定大小和角度而言,诸如墙段和立柱段之类的特征都具有鲜明的特色。这意味着它们很容易被ANT®识别并成功匹配。
相比之下,大多数其他形式的自然导航在激光测量(即点)级别上起作用。这些信息存储在网格图中,用于在操作过程中匹配车辆激光的测量值(所谓的“扫描匹配”)。
换句话说,ANT在更高的抽象层次上工作:它不是在激光测量(点)层次上工作,而是在结构(墙壁,支柱等)水平上工作。这使得ANT的匹配过程及其映射变得更加健壮,并且可以抵御环境中的动态变化。因为没有临时对象被映射-请记住,在调试期间将它们从映射中删除-从而消除了可能造成复合定位误差的因素。如果用于车辆定位的永久“自然特征”没有改变,则没有理由使ANT驱动的车辆的运行精度下降。
当我们的BlueBotics团队与长期客户就他们对不同AGV导航技术的分析和测试进行交谈时,ANT的强大功能是许多人选择和保留BlueBotics作为其导航合作伙伴的原因。

误区三:避开障碍总是意味着更高的效率
无效:避障适用于某些操作,但是虚拟路径跟踪通常(反常)效率更高。
在环境中自主移动时,由自然特征导航驱动的AGV和AMR倾向于使用以下两种模式之一:
- 跟随虚拟路径:当障碍物阻碍其分配的路径时,车辆停止行驶;或
- 避开障碍物:车辆尝试绕过任何障碍物进行动态导航,然后尽快找到返回其指定路径的路径。
ANT导航提供两种方法,但是哪种方法最有效?这取决于应用程序。
对于服务机器人,例如Cleanfix的机器人地面清洁器,它们需要覆盖定义区域内的每一英寸地面,但是覆盖它们的顺序并不那么重要。在他们工作的地方,例如商业中心,有很多障碍,例如四处游荡的人。在这种情况下,避障方法非常适合。
但是,在使用AGV自动执行物料搬运任务的工业应用中,这似乎违反直觉,但大多数情况下,虚拟路径跟随所使用的“停止并等待”方法是最有效的。
BlueBotics的首席执行官Nicola Tomatis博士解释说:“即使能够完美地避开障碍物,如果您的AGV或AMR必须在物体周围移动,与经过培训的员工保持路线畅通的路径跟随器相比,它也会减慢其前进的速度。”
此外,完全避开障碍物几乎不可能实现最佳的交通管理,这意味着使用避障装置可以通过单个车辆的自由度大大降低整个车队的性能。
Tomatis博士评论道:“考虑一下我们最近从一位北美AGV制造商客户那里得到的反馈。其客户之一是轮胎制造商,以前经营着37辆AGV车队,所有这些车都使用了避障功能。但是,当公司决定对这些车辆进行翻新时,它与ANT服务器车队管理软件一起使用了纯路径跟踪ANT导航。轮胎公司实际上总共少安装了7辆AGV。但事实证明,它现在使用的30台生产率比以前的37台提高了10%。就整体效率而言,这就是差异之路。
> 相关内容:AGV的避障功能 – 梦幻功能或危险噱头?(EN)
误区四:导航标尺排在最前
爆破:ANT通常会使用位于车辆底部的车辆现有的安全激光扫描仪。
一些使用自然导航技术的AGV会使用专用的LiDAR激光扫描仪进行导航。该传感器通常位于车辆上方的较高位置,以便可以“看到”尽可能多的环境。
此传感器位置通常表示自然导航系统使用“扫描匹配”方法而不是“特征匹配”方法(请参见神话2)。由于扫描匹配通常需要识别约60%的站点功能才能正常工作,因此将扫描仪高高地放置在车辆上很有意义:与在楼层高度进行测量相比,它可以看到更多站点。
但是,使用ANT自然特征导航时,不需要此较高的扫描仪位置。
使用ANT,可以通过特征匹配(将永久地图参考与激光扫描仪数据相匹配)和测距法的组合来确定站点地图中的车辆位置,该功能用于通过计算车辆的运动来测量车辆的位置变化。因此,ANT只需间歇性地“查看”一些环境参考(如墙壁,圆柱等),即可精确定位车辆。
如果车辆的扫描仪只能“看到” 5%(甚至更少)的环境,则ANT可以代替扫描匹配系统所需的60%的参考,而具有很高的准确性。实际上,即使在几秒钟的时间内识别出零个特征,车辆仍将继续沿其路线行驶。使用车辆现有的安全激光器进行定位-即使它们处于脚踝高度并且能见度相对有限-也不成问题。
总而言之,将导航扫描仪放在车辆上较高的位置很有用,但仅适用于需要大量参考才能有效工作的系统。 ANT也可行,但并非必需。
使用安全激光扫描仪进行车辆定位的其他好处
1.由于ANT自然特征导航使用车辆安全激光扫描仪提供的数据,因此适合每种类型的车辆外形尺寸。相比之下,如果车辆使用扫描匹配进行定位,因此需要将其导航扫描仪高高放置,则意味着无法开发“掩护”(又称“鼠标”)型AGV。
2.使用车辆现有的安全扫描仪,而不是单独的导航扫描仪,意味着车辆制造商可以减少购买和集成的组件。这也意味着潜在故障少了一点。
误解5:ANT车辆无法导航户外
破获:ANT驾驶的车辆可以而且确实可以在户外行驶。
在户外操作AGV,传统上是一个真正的挑战。大多数户外地区都缺乏自然特征。在过去,这使得计算车辆的位置很困难,这意味着有时需要添加额外的基础设施。
我们的产品扩展,ANT everywhere,通过增加高精度GNSS作为额外的数据源来计算车辆的位置,来应对这一挑战。
其结果是,户外AGV操作可以像室内一样简单、坚固和精确。
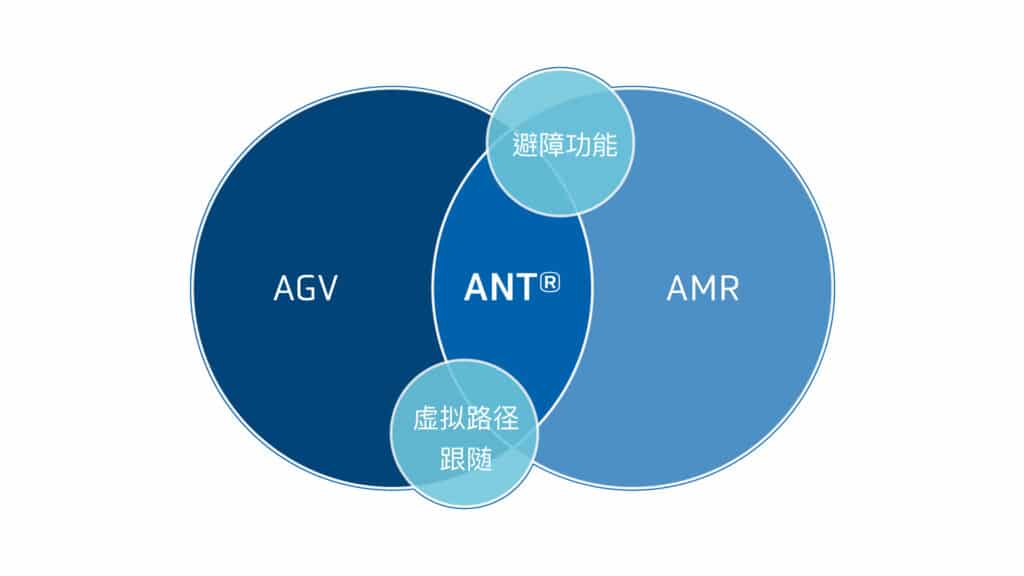
无效:AGV和AMR都可以由ANT驱动。
根据工业移动机器人的安全标准–安全要求ANSI / RIA R15.08-1-2020(R15.08),“ AGV和AMR之间的根本区别在于它们如何穿越指定的操作环境。 AGV使用避碰功能自动沿着预定义的引导路径(虚拟或物理)穿越指定的操作环境,而该标准将AMR定义为能够“通过使用传感器检测障碍物并通过计算无障碍路径来调整路径来穿越指定的操作环境”通过自由空间而不是使用预定义的路径。”
ANT导航技术适合哪种类型的自动导航车辆?答案是两者兼可!由于ANT提供了虚拟路径跟随(也称引导路径)和避障功能,因此可以驱动全部类型车辆。
为了说明ANT与这两种导航模式的兼容性,下面的视频以不同品牌的AGV(使用虚拟路径跟随)和BlueBotics AMR(使用避障)的混合车队为特色。所有这些车辆都在一个项目中由BlueBoticsANT服务器软件进行管理。
误区7:蚂蚁需要看到所有的环境,所有的时间。
无效:即使可见的参考资料极少,ANT驱动的车辆也会表现出
一个常见的误解是,每一种类型的导航系统都需要能够持续地看到或识别环境中的众多参照物,以便车辆能够准确计算其位置。
一些导航技术是这样的,但ANT不是这样的。
ANT驱动的车辆可以计算出它的位置,即使很少有环境特征是可见的。其中一个原因是,在系统的定位算法中,激光扫描仪的数据得到了强大的测距学的补充,测距学计算车辆的速度和位置。因此,如果一个或多个物体–例如另一辆车–阻挡了激光扫描仪对几个参照物的视线,这并不构成问题。事实上,ANT驱动的车辆很少会停下来并变得 “迷路”,因为即使用于定位的环境参照物中只有不到5%是可见的,车辆也能有效地运行。
相比之下,基于SLAM的导航系统需要看到更多的参照物来定位或 “定位 “地图中的AGV(见神话1)。而激光三角测量技术(有时称为激光制导车辆或LGVs)则依靠直接的视线访问,每次至少有三个反射目标,才能发挥作用。

在本文中,我们打破了BlueBotics关于ANT自然特征导航的最普遍的神话。 如果您对ANT与扫描匹配或连续SLAM导航的比较有更多疑问,请观看我们的在线讲座“成功之路”。 或者更好的是,保持联系,我们的专家团队将很乐意为您提供帮助。
_integrated_into_the_vehicle")
让我们开始吧
迈出第一步,使您的车辆自动化。请立即与我们的专家团队联系!