Che cos’è lo standard VDA 5050- Una panoramica dello standard di comunicazione AGV in evoluzione
Se lavori in Europa e hai intenzione di investire in veicoli a guida automatica (AGV), potresti aver sentito parlare dello standard VDA 5050. Soprattutto se operi nel settore dell’automotive. Che cos’è questo standard? Come potrebbe influenzare l’operatività futura della flotta AGV? Ecco la nostra guida iniziale. Qui di seguito trovi una rapida guida. Qualora avessi domande più dettagliate da porci, non esitare a contattarci.
Ultimo aggiornamento: maggio, 2022
Che cos’è VDA 5050?
VDA 5050 è un’interfaccia standardizzata creata per la comunicazione AGV. In particolare, questo standard riguarda la comunicazione tra gli AGV (spesso chiamati Fahrerloser Transportsysteme/Transportfahrzeuge (FTS) in Germania) e un controllo master (in altre parole, un programma software di gestione della flotta).
Qual è il suo obiettivo?
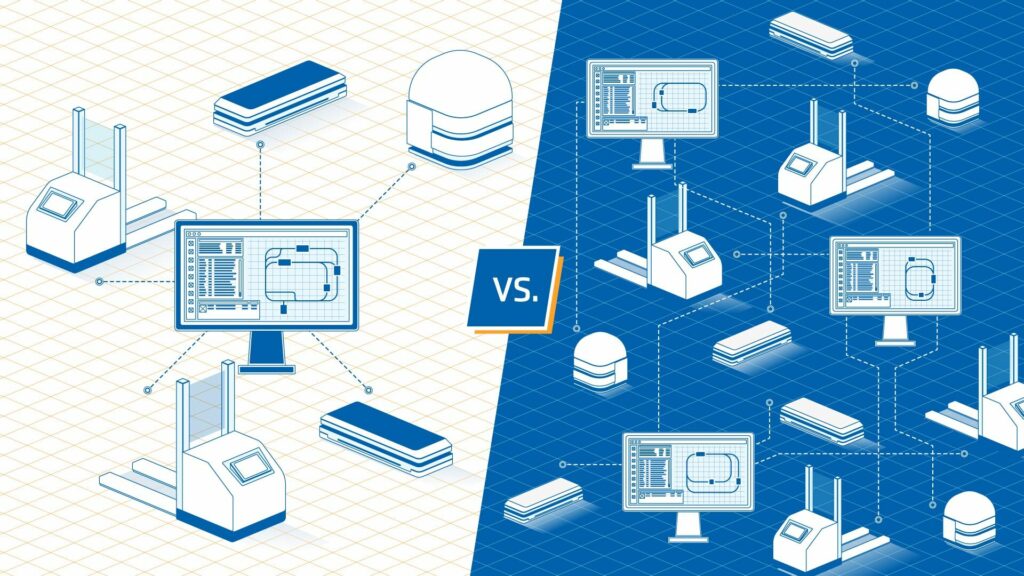
A oggi sono numerosi i produttori di AGV che propongono i propri veicoli sul mercato. Tuttavia, normalmente si tratta di veicoli compatibili unicamente con il software di gestione del produttore. Per cui, nel momento in cui un cliente si rivolge a due o più fornitori diversi di AGV, può andare in contro a diversi problemi, tra cui:
- Messa in funzione complessa: è necessaria un’installazione separata per ogni marca di AGV
- Problemi di interoperabilità: diventa difficile gestire gli AGV se devono incrociare i percorsi o condividere un ascensore, per esempio
- Perdita di spazio -marchi AGV diversi potrebbero aver bisogno di usare percorsi completamente separati
I clienti vogliono di più. Chiedono sempre più spesso che una soluzione di gestione della flotta sia in grado di gestire una grande e, soprattutto, diversificata flotta di AGV, indipendentemente dal tipo di veicolo o dalla marca.
ANT di BlueBotics permette la gestione di una flotta diversificata di veicoli guidati da ANT, indipendentemente dal tipo di veicolo (trattore, carrello elevatore, sottocarro, ecc.) o dalla marca, purché questi AGV si basino sulla nostra soluzione di navigazione ANT lite+. L’interfaccia standardizzata VDA 5050 mette a disposizione una versione più generica di questa funzionalità, che permetterebbe a ogni AGV conforme allo standard di lavorare insieme.
Chi c’è dietro VDA 5050?
VDA 5050 è il risultato di una collaborazione tra l’associazione tedesca dell’industria automobilistica (VDA) e VDMA (Materials handling and Intralogistics). Insieme coordinano il progetto VDA 5050, che coinvolge gli utenti AGV di VDA e i produttori AGV di VDMA, tra cui BlueBotics.
Cosa prevede?
VDA 5050 prevede uno standard di comunicazione tra un gestore di flotta AGV (software) e qualsiasi AGV conforme allo standard.
Come indicato nel sito di VDMA, il progetto riguarda lo sviluppo di “una nuova interfaccia con cui i sistemi di trasporto senza conducente e il software di controllo possono comunicare tra loro indipendentemente dai produttori”.
Poiché descrive la comunicazione tra due entità, gli AGV e gestore della flotta, per consentirne il corretto funzionamento VDA 5050 va implementata sia presso il gestore della flotta che gli stessi AGV.
Cosa prevede nello specifico?
Nel momento in cui viene redatto il presente articolo, (maggio 2022), sono state pubblicate due versioni complete della VDA 5050, di cui la più recente, la 2.0, nel gennaio 2022.
La prima versione/revisione della VDA 5050 riguardava l’invio di un comando a un AGV. La nuova versione, la 2.0, prevede due funzionalità aggiuntive:
- L’invio di ‘azioni’ centralmente ai singoli veicoli (ad esempio rallentare, sollevare la forca).
- Invio al sistema centrale di una “scheda informativa”, dove le funzionalità sono descritte in modo più dettagliato (ad esempio tipo di veicolo, tipo di azionamento).
La versione attualmente disponibile (Revisione 1.1) disciplina l’atto di inviare un comando a un AGV. VDA 5050 punta a fornire a un veicolo una serie di comandi in sequenza per portare gradualmente al completamento di un’intera missione.
Il server ANT funziona diversamente, fornendo ai veicoli tutti i dati di cui hanno bisogno in anticipo. Questo permette loro di essere il più indipendenti possibile dall’infrastruttura WiFi di un sito, che non è sempre forte o coerente.
Guarda il server ANT in azione:
Quali limitazioni pone vda 5050?
La versione attuale della VDA 5050 si limita alla comunicazione dei comandi agli AGV, alle specifiche dei veicoli (condivisione di schede) e all’invio di azioni, mentre restano esclusi i molti altri fattori che devono essere gestiti per garantire il successo di un’installazione multiciclo. Si tratta di un livello di dettaglio più approfondito che probabilmente sarà disponibile tra due o tre anni.
Quando entrerà in vigore?
Attualmente si sta discutendo di adottare VDA 5050 come standard di base di riferimento e per lo svolgimento di test Handling. Si prevedono nuovi aggiornamenti nei prossimi due-cinque anni, tuttavia non è ancora stata fissata una data di pubblicazione finale.
Dove è consultabile la versione attuale di VDA 5050?
Scarica qui il PDF della versione 2.0 della versione del sito di VDA.
VDA 5050 è valida solo per la germania?
No, è stata semplicemente elaborata in Germania.
VDA 5050 è nata dalla consolidata esperienza del settore automotive tedesco, che ad oggi è diventato uno dei maggiori utilizzatori mondiali di AGV. Dato che le case automobilistiche tedesche sono molto attive in tutto il mondo, possiamo dunque attenderci che lo standard trovi diffusione in molti altri paesi oltre la Germania.
Quando verrà aggiornata lo standard VDA 5050?
VDMA prevede di pubblicare la versione 2.1 o 3.0 (da confermarsi ) nel primo trimestre del 2023.
La tecnologia di navigazione autonoma (ANT) di BlueBotics sarà conforme allo standard VDA 5050?
Sì. Il nostro team sta già lavorando per rendere il server ANT conforme allo standard VDA 5050 (per quanto possibile date le limitate specifiche oggi disponibili).
Hai una domanda?
Hai una domanda su VDA 5050 o il server ANT? Se sì, contattateci e il nostro team di esperti sarà lieto di assisterti. Oppure, se hai appena iniziato il tuo viaggio nel mondo dell’automazione, dai un’occhiata al nostro ebook gratuito, Percorsi verso il successo.
_integrated_into_the_vehicle")
Cominciamo
Fai il primo passo verso l’automatizzazione del tuo veicolo.
Entra in contatto con il nostro team di esperti oggi stesso.