VDA 5050 Explained – An Overview of the Evolving AGV Communication Standard
If you are in Europe and work with, or plan to invest, in automated guided vehicles (AGVs), you might have heard of VDA 5050. Especially if you are involved in the automotive sector. So, what is this standard? And how might it affect future AGV fleet operations? Below is our quick starter guide. If you have more detailed questions, please get in touch.
Post last updated: December, 2022
What is VDA 5050?
VDA 5050 is a standardized interface for AGV communication. Specifically, this standard concerns the communication between AGVs (often called Fahrerloser Transportsysteme/Transportfahrzeuge (FTS) in Germany) and a master control (in other words, a fleet management software program).
What is its goal?
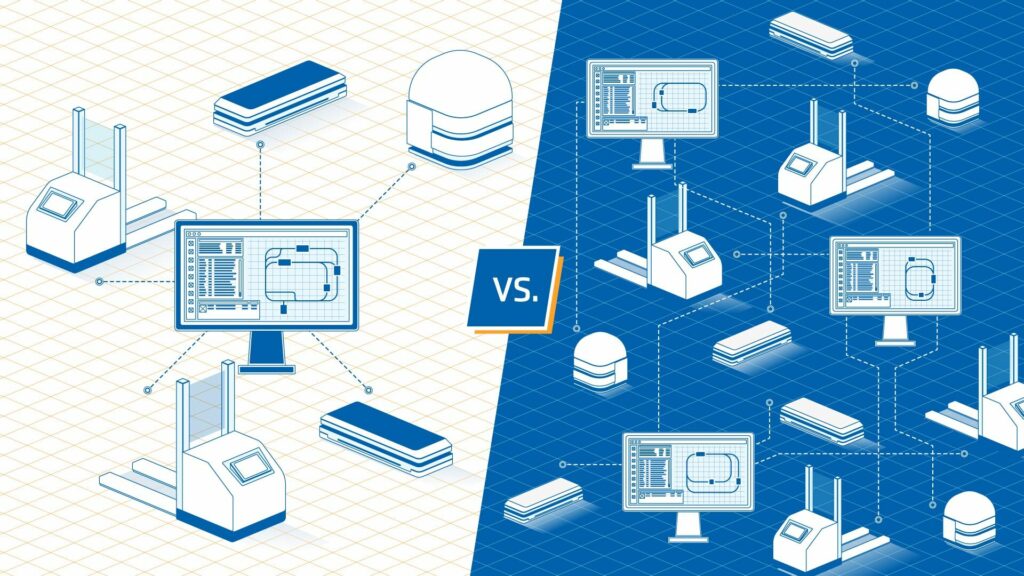
Today, there are many different AGV manufacturers offering vehicles to the market. But, typically, these AGVs only work with their manufacturer’s own specific fleet management software. As soon as a customer requires AGVs from two or more different suppliers, this results in serious challenges, including:
- Complex commissioning – a separate installation is needed for each brand of AGV
- Interoperability issues – it becomes difficult to manage AGVs if they need to cross paths or share an elevator
- Lost space – separate AGV brands might need to use completely separate paths
Customers, however, want more. They are increasingly demanding that a fleet management solution should be capable of running a large and, more importantly, diverse fleet of AGVs – whatever the vehicle type or brand.
BlueBotics’ ANT server software already enables the management of a diverse fleet of ANT driven vehicles, no matter what the vehicle type (tractor, forklift, underride, etc.) or brand – provided these AGVs are built upon our ANT lite+ navigation solution.
VDA 5050 intends to provide a more generic version of this functionality, which would enable every compliant AGV to work together. At the time of writing (December 2022), it is questionable as to whether the standard achieves this goal. We will discuss this further later in this post.
Who is behind VDA 5050?
It is the result of a collaboration between the German Association of the Automotive Industry (VDA) and the VDMA Materials handling and Intralogistics Association. These associations are jointly coordinating the VDA 5050 project, which involves the VDA’s AGV user members as well as AGV manufacturer members of the VDMA, including BlueBotics.
What does it cover – in general?
VDA 5050 proposes a standard of communication between an AGV fleet manager (software) and any compliant AGVs being operated on-site.
As the VDMA’s website states, the project is about developing “a new interface with which driverless transport systems and control software can communicate with each other independently of manufacturers”.
Since it describes communication between two entities – AGVs and a fleet manager – VDA 5050 will need to be implemented at both ends of this communication channel (i.e., within the fleet manager and within the AGVs themselves) in order to function correctly.
What does it cover – specifically?
At the time of writing (December 2022), two full versions of VDA 5050 have been published. The latest, version 2.0, was published in January 2022.
The first version/revision of VDA 5050 covered the act of sending a command to an AGV. The latest version, 2.0, adds two additional functionalities:
- Sending ‘actions’ from the master control to individual vehicles (e.g. slow down, lift fork).
- Allowing a vehicle to send a ‘Fact Sheet’ that describes its functionality in more detail (e.g. type of vehicle, drive type) to the master control.
The base concept of VDA 5050 is to provide a vehicle with sets of commands, one after another, gradually leading to an entire mission being completed.
ANT server works differently by providing vehicles with all the data they need upfront. This allows them to be as independent as possible from a site’s WiFi infrastructure – which is not always strong or consistent – during operation.
See ANT server in action:
When will it go into effect? Can vehicles today be fully VDA 5050 compliant?
VDA 5050 is proposed today as a base standard for discussion and testing. It will evolve over the coming two to five years. However, its final publication date has not been confirmed.
As the standard is not final, vehicles today cannot be fully VDA 5050 compliant.
Some end-user projects comply with VDA 5050 as it stands today: with vehicle-specific software (and a lot of work ), AGVs can communicate with one another. However, the installations that BlueBotics’ team has seen fall short of the final promise of VDA 5050. While vehicles from different brands can and do communicate with one another, they require a great deal of coding to set up, and this work must be replicated for each new vehicle that is added to the installation.
What’s more, in this specific instances, the vehicles can be thought of communicating in a second language, rather than in their mother tongues. Like anyone communicating in a second language, nuances may be lost as complex information is difficult to express. As a result, the complex interactions between vehicles which VDA 5050 promises is still out of reach.
When the standard is has been finalized, any current VDA 5050-compliant AGV installations will need to be updated, and in most cases completely reworked. This will mean effectively re-installing the project from scratch. The alternative will be an AGV user remaining locked in to a complex and expensive system complete with custom, legacy code – exactly the outcome VDA 5050 was designed to avoid.
What are the limitations of VDA 5050?
The current version of VDA 5050 is limited to the communication of commands to AGVs, vehicle specifications (Fact Sheet sharing) and sending actions.
It does not yet span the many other factors that must be managed to ensure a successful multi-vehicle installation. This deeper level of detail is still to come, most likely in the next two to three years.
Where can I access the current version of VDA 5050?
A PDF version of version 2.0 is available from the VDA’s website here.
Is VDA 5050 only for Germany?
No, it is not only for Germany. It just comes from there.
VDA 5050 was born out of the country’s strong automotive sector, which is today one of the world’s largest users of AGVs. With German car manufacturers being very active worldwide, however, we can expect them to drive this standard not only in Germany but more widely across Europe and possibly across other regions too.
When will VDA 5050 next be updated?
The VDMA is planning to release either version 2.1 or 3.0 (to be confirmed which) in Q1, 2023.
Will BlueBotics’ Autonomous Navigation Technology (ANT) be VDA 5050 compliant?
Yes. Our team is already in the process of making ANT server VDA 5050 compliant (as much as is possible within the limited specifications available today).
However, our fleet management solution, ANT server is a more complete solution than VDA 5050 is likely to be.
Got a question?
Do you have questions about VDA 5050 or ANT server? If so, please get in touch and our expert team will be glad to help. Or if you are just starting your automation journey, check out our free ebook, Paths to Success.
Let's get Started
Take the first step to automating your vehicle.
Schedule a call with our expert team today.