 Salta al contenuto
Salta al contenutoNavigazione naturale: Scan Matching verso Feature Matching
Il successo o il fallimento di un progetto di automazione dipende tutto dalla tecnologia di navigazione. In questo articolo vengono analizzate le differenze tra i due principali tipi di tecnologie di navigazione naturale e i rispettivi pro e contro.
Il successo o il fallimento di un progetto di automazione dipende tutto dalla tecnologia di navigazione.. Ecco perché le aziende che automatizzano i veicoli industriali scelgono molto spesso tecnologie di navigazione naturale affidabili e flessibili.
In questo articolo
- Qual è la differenza tra scan matching e feature matching?
- Un veicolo può navigare con precisione senza vedere tutto?
- Dove si trovano gli scanner di navigazione di un AGV?
- La connettività internet è necessaria agli AGV che utilizzano la navigazione naturale?
- È più preciso lo scan matching o la navigazione naturale feature matching?
- Se un veicolo non rileva le parti dinamiche dell’ambiente, si verificheranno collisioni?
- Quale tecnologia di navigazione naturale è preferibile?
Qual è la differenza tra scan matching e feature matching?
In breve, le odierne tecnologie di navigazione naturale utilizzano una delle seguenti metodologie: lo scan matching (talvolta chiamato navigazione SLAM) o il feature matching (utilizzato da ANT).
Come funziona lo scan matching
Con la tecnologia scan matching, le misurazioni degli scanner laser del veicolo vengono confrontate (abbinate) con le celle di una mappa di riferimento, realizzata sottoforma di griglia, dell’ambiente. Tali celle possono essere paragonate ai pixel di un’immagine digitale.
Il sistema di navigazione calcola la posizione del veicolo utilizzando i punti abbinati per posizionarsi (localizzarsi) nella mappa. Allo stesso tempo, utilizza l’odometria, che misura il cambiamento di posizione del veicolo calcolando il suo movimento. Solo in rari casi, gli aggiornamenti registrati dal veicolo verranno riportati sulla mappa di riferimento da un sistema di scan matching.


Come funziona il feature matching
Con la tecnologia ANT feature matching, le misurazioni degli scanner laser del veicolo vengono confrontate (abbinate) con i riferimenti permanenti della mappa (caratteristiche), come muri e pilastri. Possono essere aggiunti degli adesivi riflettenti per fornire ulteriori riferimenti, se in un luogo mancano elementi distintivi.
Un vantaggio fondamentale dell’abbinamento delle caratteristiche, rispetto ai punti laser, è che tali caratteristiche possono essere facilmente riconosciute grazie a dimensioni e angolo specifici. Pertanto, il sistema riesce in modo semplice a identificarle e abbinarle con successo.
Quindi, per localizzare il veicolo sulla mappa, la tecnologia ANT utilizza sia l’odometria che la corrispondenza di elementi, escludendo tutti gli oggetti “dinamici” non permanenti (come pallet, scatole, persone ecc.) dai propri calcoli.
Siccome contiene solo le coordinate degli elementi statici e permanenti, la mappa risultante è molto più piccola, in termini di dimensioni del file, rispetto a una mappa usata per lo scan matching.


Un veicolo può navigare con precisione senza avere una visuale completa?
Sia i veicoli che usano il feature matching che quelli con tecnologia scan matching hanno bisogno di “vedere” e abbinare le caratteristiche dell’ambiente per localizzarsi con precisione.
Tuttavia, la proporzione di caratteristiche ambientali che devono essere prese in considerazione varia drasticamente:
- lo scan matching deve poter riconoscere almeno il 60% dell’ambiente per ottenere un posizionamento accurato.
- Il feature matching, invece, deve poter riconoscere il 5% o meno dell’ambiente per ottenere un posizionamento preciso. In effetti, anche se per diversi secondi non è in grado di stabilire un abbinamento di caratteristiche, i veicoli guidati dalla tecnologia ANT possono continuare a navigare adeguatamente per alcuni metri grazie all’uso dell’odometria.
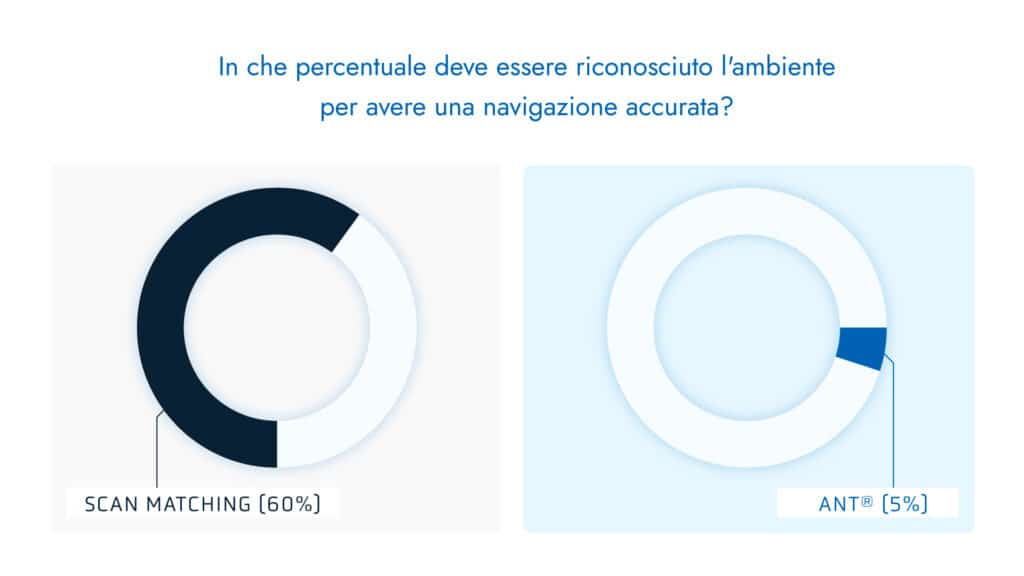
Pertanto, i veicoli guidati con tecnologia ANT hanno bisogno di riconoscere solo una piccola percentuale dell’ambiente per navigare adeguatamente.
Dove si trovano gli scanner di navigazione di un AGV?
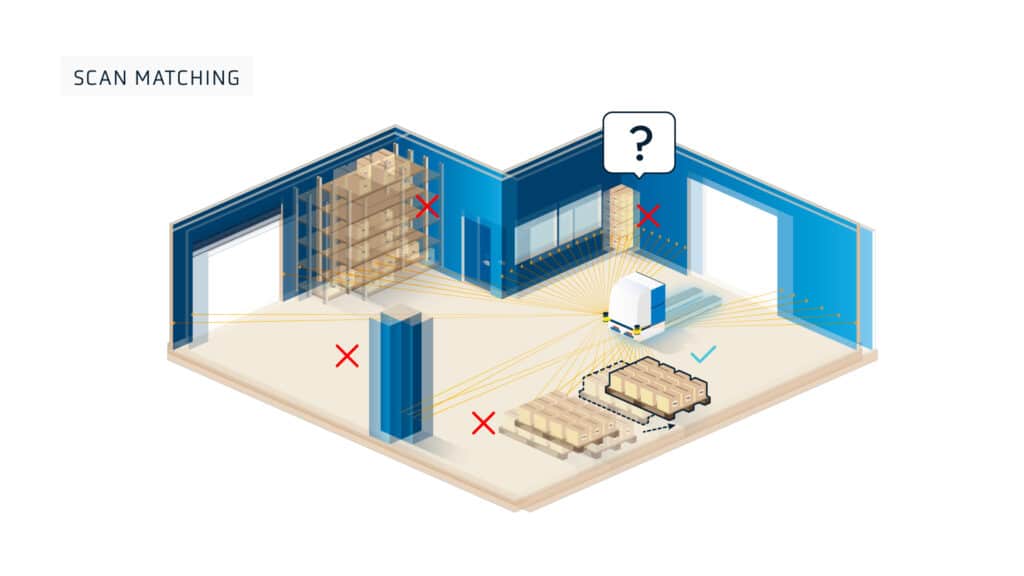
La maggior parte dei veicoli feature matching (con tecnologia ANT) non utilizza uno scanner laser dedicato per navigare. Al contrario, si affidano agli scanner laser di sicurezza integrati, situati alla base del veicolo stesso.
Pertanto, i veicoli feature matching rileveranno oggetti inaspettati come una nuova pila di pallet e il sistema di sicurezza eviterà collisioni, ma tali oggetti dinamici non verranno aggiunti alla mappa, come illustrato sopra.

Al contrario, quelli che utilizzano lo scan matching spesso dispongono di uno scanner laser aggiuntivo. Solitamente quest’ultimo è posizionato sulla parte superiore del veicolo per garantire l’abbinamento del maggior numero possibile di punti nell’ambiente.
Svantaggi dell’uso di uno scanner laser aggiuntivo
- L’uso di uno scanner aggiuntivo comporta un costo maggiore per il costruttore del veicolo (e probabilmente un prezzo finale più alto per l’acquirente dello stesso).
- Ogni pezzo aggiuntivo di un hardware è un potenziale punto debole in più.
- Posizionando gli scanner laser sulla parte superiore del veicolo, si riduce anche la gamma di veicoli che un produttore può offrire al mercato. Per esempio, l’uso di uno scanner separato per la navigazione non permette la produzione di AGV con sottocarrello basso o del tipo ‘mouse’, i quali sono progettati per muoversi sotto i carrelli.
- I laser posizionati in alto sul veicolo sono più sensibili all’inclinazione o all’imbardata a causa di superfici irregolari o pneumatici morbidi.

La connettività internet è necessaria per gli agv con navigazione naturale?
Grazie al feature matching, la mappa utilizzata dal veicolo non ha bisogno di essere aggiornata a meno che non ci siano modifiche permanenti nell’ambiente. Pertanto, i veicoli con tecnologia ANT non hanno bisogno di un accesso wifi stabile e costante. I clienti di BlueBotics riferiscono che spesso è sufficiente una connessione in loco non totalmente stabile (o Bluetooth o altre comunicazioni wireless). La connettività a banda bassa è necessaria solo per le interazioni guidate dal server, come quando i veicoli si interfacciano con le attrezzature (ascensori, porte automatiche) e per il controllo del traffico.
Al contrario, un veicolo con tecnologia scan matching che aggiorna regolarmente la mappa richiede una connettività wireless stabile e costante, ma non sempre ciò è possibile nei magazzini e nelle officine. Questo perché tutti i veicoli della flotta devono scaricare ogni mappa aggiornata da un server centrale, preferibilmente in tempo quasi reale. Bisogna tenere a mente che tali mappe sono incredibilmente dettagliate, basate su griglie e possono avere file di dimensioni molto grandi.
È più preciso lo scan matching o il feature matching?
Utilizzando la navigazione naturale, non è facile garantire la ripetibilità e l’affidabilità delle operazioni di un AGV. Tuttavia, ANT fa entrambe le cose, mantenendo precisione (circa ±1 cm / ±1°).
La precisione della localizzazione dei veicoli tramite scan matching è paragonabile alla dimensione delle celle della mappa di riferimento. Per ridurre le dimensioni del file, i veicoli che utilizzano lo scan matching spesso ridimensionano le proprie mappe, creando celle di dimensioni comprese tra i tre e i dieci centimetri. I veicoli con tecnologia ANT non devono far fronte a tale limitazione poiché la mappa di riferimento, che contiene solo elementi permanenti, è un file di dimensioni inferiori e non ha bisogno di essere ridimensionata.
Inoltre, poiché lo scan matching registra l’intero ambiente alla ricerca di corrispondenze, vengono individuati anche gli oggetti dinamici, che possono essere spostati. Per esempio, i pallet possono essere posizionati regolarmente in una sezione della banchina di carico. Se venissero posizionati sempre nella stessa esatta posizione, con una precisione centimetrica, ciò non causerebbe alcun problema, ma questo non accade quasi mai. Pertanto, se tali pallet vengono posizionati pochi centimetri fuori allineamento, il veicolo può supporre che siano nel posto corretto e regolare il resto della mappa di conseguenza, modificando il posizionamento in modo errato e rendendo impreciso ogni altro punto.
Se un veicolo con navigazione scan matching aggiorna la mappa di riferimento con letture intrinsecamente imprecise, qualsiasi errore sarà caricato sul server di gestione dei veicoli del sistema e la mappa aggiornata sarà scaricata sul resto della flotta, diffondendo e aggravando così l’errore.
Prendendo lo stesso esempio, un veicolo con tecnologia ANT non registrerebbe affatto la posizione dei pallet. Questi ultimi verrebbero ignorati, a meno che non venga ordinato ai veicoli di interagire con loro.
Se un veicolo non prende in considerazione le parti dinamiche dell’ambiente, si verificheranno collisioni?
> Correlato: Mito – Evitare gli ostacoli significa sempre maggiore efficienza
Quale tecnologia di navigazione naturale è preferibile?
Ogni azienda ha le proprie sfide da affrontare. Tuttavia, per facilità d’uso, precisione e affidabilità nel funzionamento, crediamo che la navigazione ANT sia la scelta migliore per qualsiasi tipo di veicolo.
Guarda il nostro ultimo webinar per scoprire di più sulle altre tecnologie di navigazione (tra cui line following e tag following), oppure contattaci per qualsiasi domanda su come ANT può aiutare la tua azienda.
_integrated_into_the_vehicle")
Cominciamo
Fai il primo passo verso l’automatizzazione del tuo veicolo.
Entra in contatto con il nostro team di esperti oggi stesso.