 Salta al contenuto
Salta al contenutoMetodi Di Navigazione AGV 1: Seguenti Linee E Tag
Quando si sviluppa o si aggiorna un veicolo a guida automatica (AGV) o un robot mobile, è fondamentale investire nella giusta tecnologia di navigazione autonoma. In questa esclusiva guida in due parti esploriamo i diversi metodi di navigazione AGV disponibili, partendo da qui con le tecnologie che seguono la linea fisica.
La scelta del metodo di navigazione AGV sbagliato può avere un effetto drammatico sul costo, sull’efficienza e quindi sul successo della soluzione automatizzata prodotta. Questo è vero sia nella fase di sviluppo, quando si integra la tecnologia di navigazione nel vostro veicolo, sia, in futuro, quando il vostro veicolo sarà sul mercato e voi installerete quel veicolo presso i clienti.
In questa serie esclusiva in due parti, discuteremo le diverse opzioni di navigazione AGV per aiutarti a fare la scelta migliore.
Metodi di navigazione AGV: fisici o virtuali
Come spiegherà questa guida, sono disponibili numerosi metodi di navigazione AGV. Tuttavia, questi possono essere ampiamente suddivisi in due categorie:
- Tecnologie di navigazione che guidano i veicoli lungo linee fisiche (aka line following). Queste linee potrebbero assumere la forma di nastro magnetico, linee dipinte, filo induttivo o (meno spesso in questi giorni) binari. Possiamo anche includere tag in questa categoria per semplicità.
- Tecnologie di navigazione che guidano i veicoli lungo percorsi virtuali (cioè digitali), che esistono solo nel software del veicolo.
Questo articolo si concentra sulla prima categoria di tecnologia: la linea fisica e le tecnologie che seguono i tag.
In questo post | Naviga in una sezione
Linea che segue la navigazione
Con le tecnologie di navigazione che seguono la linea, gli AGV sono letteralmente guidati attraverso una struttura da una linea fisica, come nastro magnetico, filo induttivo (installato nel / sotto il pavimento) o linee dipinte.
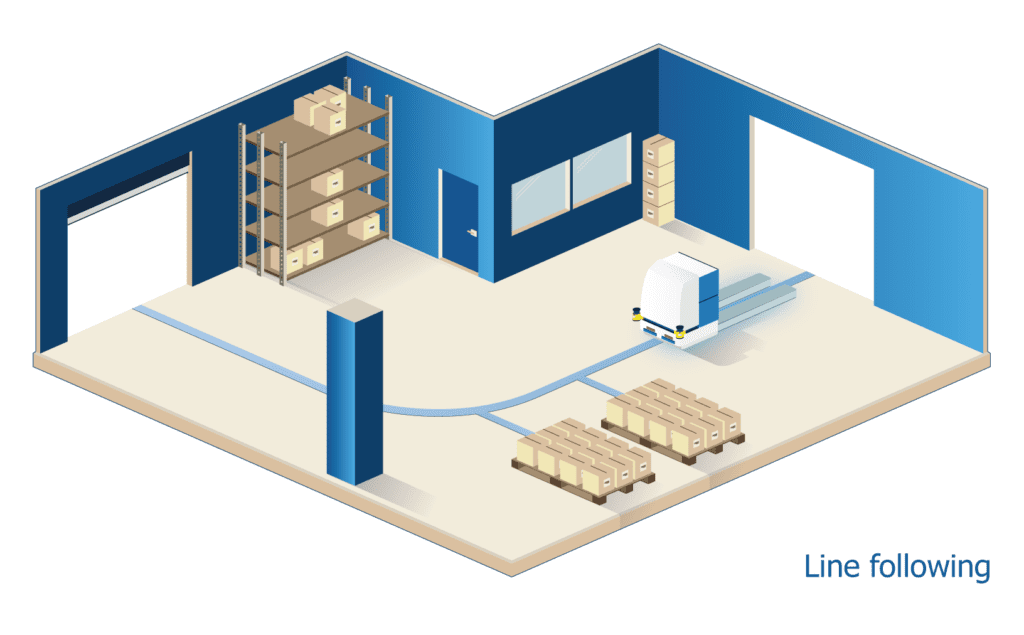
Questo approccio funziona nel modo seguente: il veicolo è dotato di un sensore che “guarda” la linea sul pavimento. Quindi, misura l’errore sinistro e destro e utilizza queste informazioni per correggere la traiettoria del veicolo.
Questo semplice metodo di navigazione AGV è ideale per le applicazioni in cui un veicolo si muove continuamente attorno a un circuito. Un esempio comune è la produzione automobilistica, in cui i robot mobili spostano le parti da una stazione all’altra.
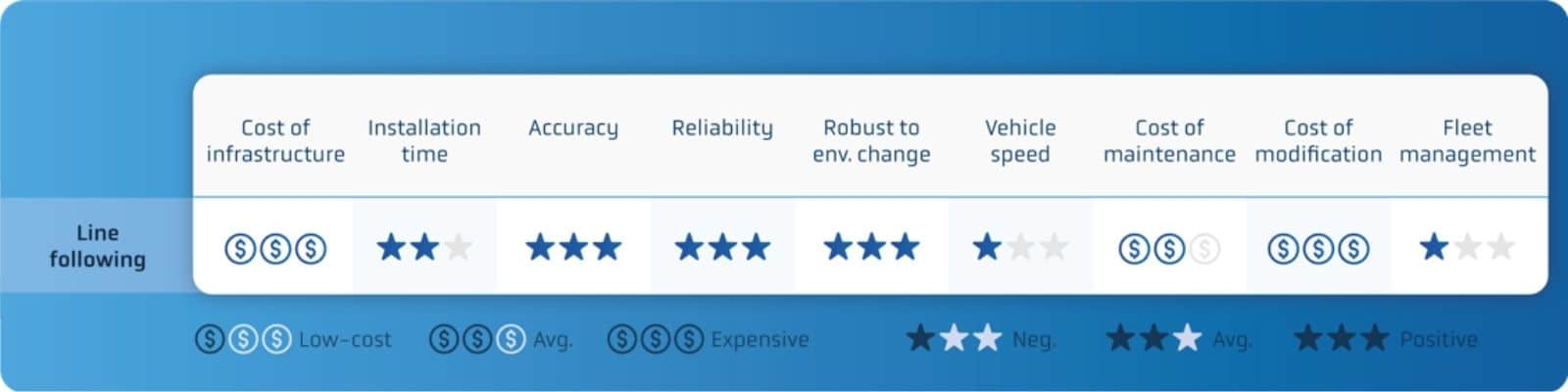
Tra i lati positivi, quindi, seguire la linea è semplice, eccezionalmente affidabile, preciso e stabile. Tuttavia, ha i suoi svantaggi.
- In primo luogo, ci vuole tempo per tracciare e, in futuro, modificare i percorsi. Ciò è particolarmente vero nel caso del filo induttivo, che è letteralmente installato nel pavimento stesso.
- Gestire una flotta di veicoli che seguono la linea può essere difficile se non impossibile, soprattutto quando più linee devono incrociarsi. Anche la gestione del traffico può essere estremamente difficile per installazioni complesse.
- Anche le linee stesse possono richiedere manutenzione. Il nastro magnetico, ad esempio, può strapparsi nel tempo.
Linea seguente: punti di forza e punti di debolezza
Tag seguendo la navigazione
L’inseguimento di tag funziona più o meno allo stesso modo dell’inseguimento di linee fisiche. Tuttavia, in questo caso gli AGV sono guidati attraverso una struttura da tag come codici QR, tag RFID o punti magnetici incorporati nel pavimento.
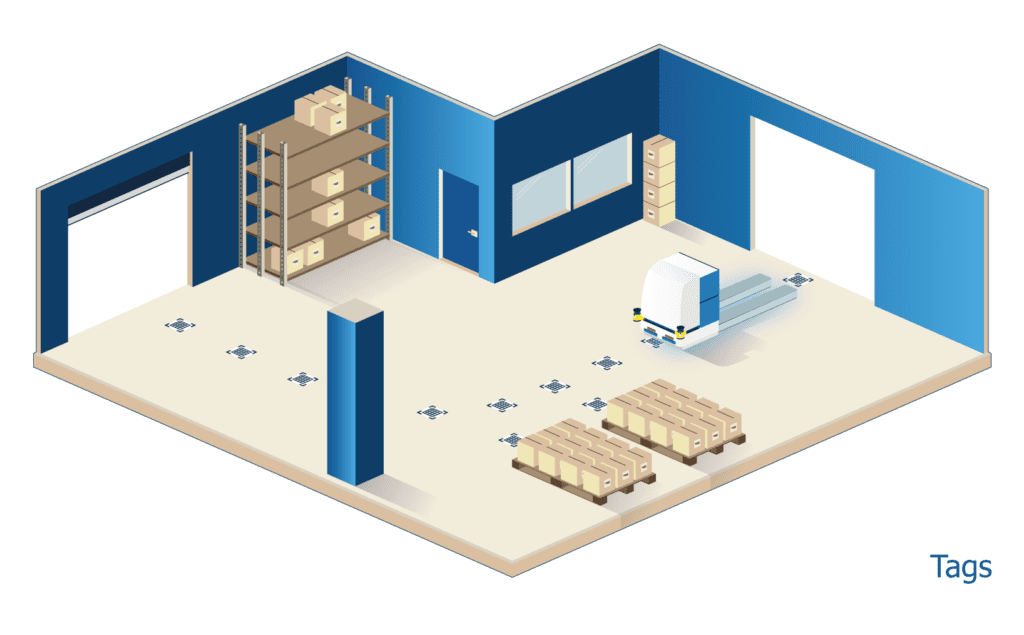
Qualunque sia il tipo di tag, il veicolo è dotato di un sensore specifico per seguire il percorso definito da questi tag – in questo senso questo approccio è proprio come seguire la linea. Il tag following è il riferimento nell’e-commerce, dove i layout dei percorsi semplici sono la norma.
I pro ei contro della navigazione dei tag sono quindi molto simili a quelli delle tecnologie che seguono la linea: i tag richiedono tempo per l’installazione fisica (e la modifica in futuro) e la manutenzione sarà richiesta nel tempo, tuttavia, i tag sono eccezionalmente affidabili e robusti nel funzionamento.
Tag che segue: punti di forza e punti di debolezza

Linea seguente vs. Tag seguente
Confrontando direttamente i metodi di navigazione AGV che seguono e che seguono tag, possiamo vedere che questi approcci hanno punti di forza e di debolezza molto simili. I veicoli che seguono la linea tendono a spostarsi leggermente in avanti in termini di precisione di posizionamento (ad esempio quando si raccolgono, si lasciano cadere e si attraccano per ricaricare), tuttavia, spesso viaggiano più lentamente degli AGV che seguono il tag.

Leggi la parte 2 per esplorare i metodi di navigazione AGV virtuale.
Guarda: webinar di navigazione AGV
Per ascoltare gli esperti di BlueBotics confrontare le diverse tecnologie di navigazione autonoma odierne, guarda il nostro webinar esclusivo.
_integrated_into_the_vehicle")
Cominciamo
Fai il primo passo verso l’automatizzazione del tuo veicolo.
Entra in contatto con il nostro team di esperti oggi stesso.