Blog
驾驭移动自动化的世界
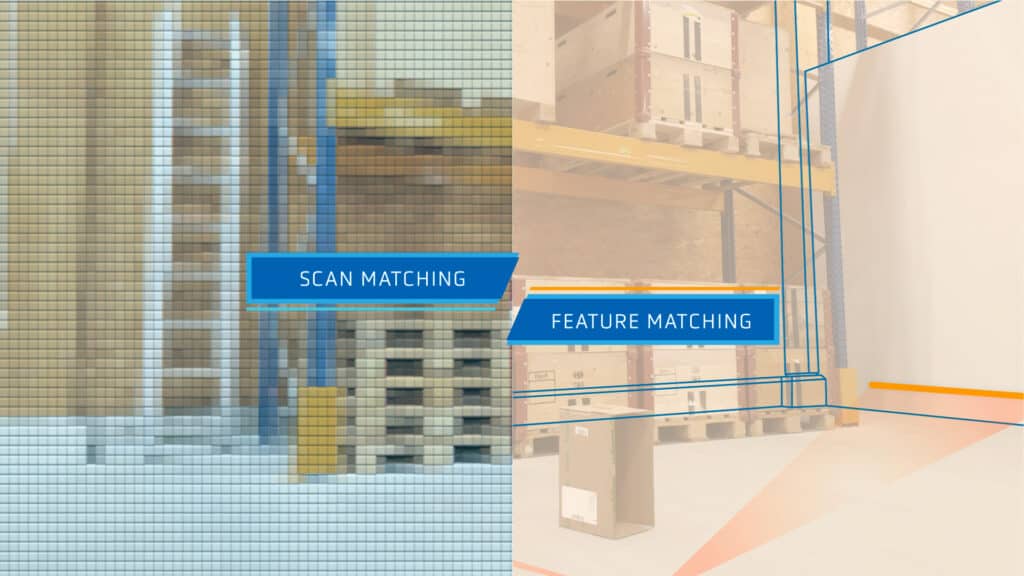
车辆自动化项目的成败取决于其导航技术。本文探讨了两种主要自然导航技术之间的区别,以及各自的优缺点。
阅读更多>>
制造业日:欢庆自动导航车(AGVS)加入生产运作
今天(2020年10月2日)举办的制造业日正,旨在欢庆现代制造业发展,包括已经投入生产的自动导航车(AGV)。
阅读更多>>
确保自动导航车(AGV)调试成功的7大秘诀
BlueBotics专家工程师团队已在全球各地完成安装,并帮助客户安装了数百辆自动导航车和移动机器人。 以下是我们确保AGV调试成功的七个主要秘诀。
阅读更多>>
自动化未来的10个思想家
我们知道,自动化在未来几年将影响我们生活的各个方面:包括工作、学校、休闲和家庭。但是,这种自动化未来究竟会怎么样?
阅读更多>>
开发自动化叉车的5个商业理由
当今许多领先的叉车制造商都会提供自动叉车。无论如何,有些公司并没有,因此其公司产品组合并没有准备好充分利用自动导航车辆(AGV)市场的增长。您的公司也是其中之一吗?
阅读更多>>
成功实现车辆自动化的三个重要建议
在一个新视频中,BlueBotics首席执行长Nicola Tomatis博士坐下来分享他在车辆自动化方面的专业知识。
阅读更多>>
一起工作。Esatroll的AGV系统
Estatroll证明了真正的自动化可以通过集成的AGV系统来实现。他们的AGV车队在室内和室外的复杂环境中共同工作。
阅读更多>>
了解GENESIS创新项目:ABB屡获殊荣的自动化项目
从微波炉到手机,所有为我们生活方式提供支持的设备几乎都含有半导体。
阅读更多>>
安全自动化:制造商如何设计AGV安全
有很多关于在自动车辆工作时保持安全的信息。但是,制造商如何确保他们的AGV是安全的,在它击中车间之前?
阅读更多>>
开发AGV时需要避免的5个误区
自动导引车(AGV)的开发是一项复杂的业务。虽然一个强大的、易于使用的移动机器人可以在未来几年内推动您的车辆业务,但要产生这样一个长期盈利的工具,这个过程里充满了潜在陷阱。
阅读更多>>
这是SLAM导航吗? 7个ANT导航神话的破灭
从SLAM问题开始,我们消除了有关BlueBoticsANT导航技术的最常见神话。
阅读更多>>获得电子邮件更新
注册后可定期收到BlueBotics的电子邮件,其中包含我们最新的博客文章和新闻故事。