 Skip to content
Skip to contentAGV导航方法2:虚拟路径跟随
本指南第一部分,我们讨论了遵循物理线或标签跟随的AGV导航方法。在第二部分中,我们将探索遵循虚拟路径的导航技术。
在本文中,我们将讨论新一代AGV导航方法,这些方法涉及遵循车辆软件创建的虚拟(或数字化)路径,而不是设置在工作间。
此文章内容| 导航到某个区域
激光三角定位
激光三角定位的工作原理(有时也称为激光目标导航,或简称激光导航)类似于全球定位系统(GPS)导航。
激光三角定位至少使用三个参考值来进行车辆位置的三角定位。 但是,有别于使用卫星科技的全球定位系统(GPS)导航,此方法使用位于车辆顶部的激光扫描仪。这些激光束能够反射出环境中经由专业安装的激光三角反射目标。
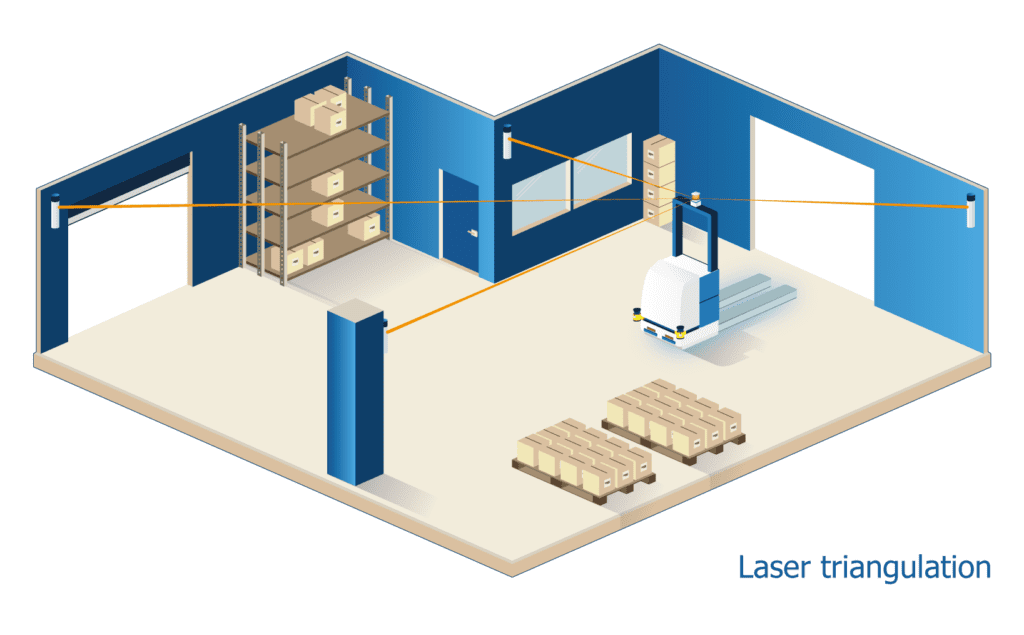
由激光三角定位驱动的自动导航车(AGV)依赖需专业安装的反射镜识别。 有别于路线和标签跟随的AGV车辆,这些导航技术基于地面物体执行AGV任务逻辑,而使用三角定位则可以使用软件对任务逻辑进行编程。
如同路线跟随导航技术,激光三角定位导航技术非常可靠。它具有高度精确定位(这是有效提取、放置和车辆充电的必需因素),而且车速可能相对更快。
另外,由于这项技术使用虚拟路径而不是物理路径,因此维护成本较低,比起路线跟随和标签跟随导航更容易进行有效的车队和交通管理。路线修改也非常快速简单,除非进行重大更改才需要额外安装现场反射器。
无论如何,这项技术也有缺点:
- 激光三角定位系统可能需耗费大量时间进行设计和安装。这项工作始于计算机辅助设计(CAD)软件,技术人员通常使用该软件来设计整个站点的反射器部署,接着安装反射器,然后由合格测量员进行几天工作,以准确地测量反射器位置并创建AGV将使用的地图。
- 用于车辆定位(也称为定位)的LiDAR激光扫描仪通常会安装在车辆上方,以识别反射器并避免可能掩盖这些参考元素的人类或可移动物体。这个额外组件会增加车辆成本,并有效限制车辆制造商使用某些类型的车辆,例如:无法在自动导航拖车(AGC)或“鼠标型”自动导航车安装额外传感器。
激光三角定位导航技术分析:优势与劣势

视觉导航技术
视觉导航技术与人类如何看待世界的概念相似。它使用摄像头代替我们的眼睛来识别环境中的特征。然后再将这些与3D地图进行比较,从而使车辆能够计算位置并进行导航。
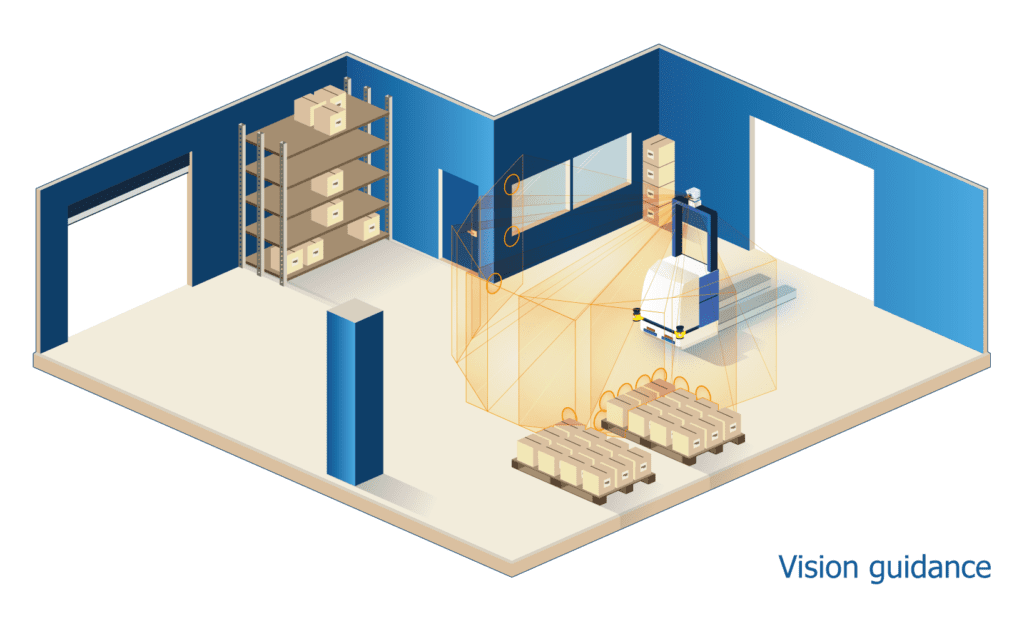
视觉导航AGV的安装非常简单快捷,因为视觉导航不需要对站点的现有基础设施进行任何更改:用户只需沿着路线驾驶车辆并持续收集图像,从而了解路线和位置并构造3D地图。
维护视觉导航系统的时间和成本也很低,因为更改路线只需由操作人员重新培训车辆,并在所需的新路线周围手动驾驶。
但是,这项技术存在视觉相关系统的常见缺陷:
- 光照条件的变化(例如:眩光或黑暗)可能会影响系统的准确性。
- 随着环境发生变化,相机和图像分辨率可能会产生类似的变化效果。
视觉导航技术:优势和劣势

自然特征导航
自然特征导航(有时称为自然导航或SLAM导航)使用激光扫描仪,例如 :车辆的内置安全扫描仪。它会将当前的2D扫描图像与先前创建的地图进行比较,以计算车辆的位置。
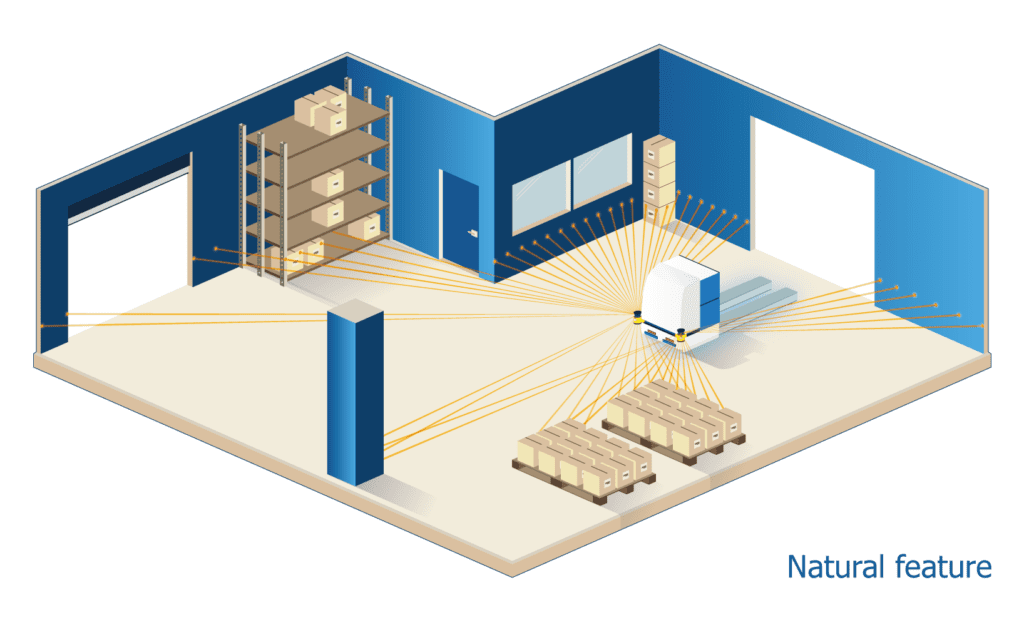
自然特征导航技术结合两种方法运作。这些方法包括:
- 扫描匹配 – 将扫描仪数据与参考图进行比较并不断更新。
- 特征匹配 – 将数据与环境中的永久“特征”(例如:墙和圆柱)进行比较,而且不会覆盖参考图。
通过扫描匹配收集的原始激光数据与原始图进行比较,如果检测到新物体则更新地图。这种方法需要高质量扫描才能正确匹配。采用的地图类型(基于网格的单元格分辨率较低)也可能会对车辆定位精准度产生不利影响。
相比之下,通过永久性环境特征相对较少的匹配扫描,比如使用墙、立柱和永久性安装机械对车辆进行定位的参考。这种方法具有高度稳健性,因为它只需少量参考物件(即环境的5%或更少)来确保车辆的准确定位。
除此之外,由于地图永远不会改变,除非发生重大基础设施变化(例如 :移动墙),否则精准度会随着时间推移而保持不变。
最少量的基础设施变化
除非是最具竞争力的AGV导航方法,否则采用自然特征技术无需对现场基础设施进行重大更改,例如:安装感应线或磁带、铺设胶带或设置用于三角定位的反射器。结果,无论是单个自动导航车还是大型AGV车队,采用此技术驱动的AGV都易于安装和维护。
与视觉导航相似的自然特征技术易于安装,因为它所需的基础架构更改量很少。如果一个区域的自然特征很少,那么最多可能需要一些反射贴纸。
与激光三角定位类似,自然特征导航采用专属的软件工具,这些工具用于在安装过程中对车辆的路线和动作进行编程。
但是,由于自然特征仍是一项相对较新的技术,因此大多数供应商尚未配备高级或非常直观的软件工具,这可能会使得安装过程复杂化。例如:基于扫描匹配的自然特征导航通常需要诸如开源式机器人操作系统(ROS)之类的框架,这个框架能为此类制造商提供简单的切入点,但需要大量时间和大量投资才能实现工业化。
附加组件
如同激光三角定位系统,许多扫描匹配供应商会建议车辆制造商在车辆上方安装专用于导航的激光扫描仪,而不是使用车辆的脚踝高度安全激光扫描仪来定位数据。这种方法提高了车辆的成本,因为需要购买另一个组件,而且限制了可以生产的车辆类型。
往好的方面分析,使用自然特征导航来修改安装(更新路线、更改操作)是一个快速及有效的过程,因为路径是虚拟的,而且不需要费时进行基础结构更改。
车队管理功能也广泛应用。但是,由于许多自然特征导航供应商都是刚进入市场的新公司,因此创新先进的车队解决方案仍然很少。
自然特征导航:优势和劣势

使用ANT驱动的自然导航技术
有别于其他自然特征导航技术,BlueBotics的自主导航技术(ANT)使用特征匹配方法。这意味着它的车辆定位地图是基于环境特征,而不是扫描匹配基于网格的地图,根据特征与特征进行比较,而不是在激光点与激光点之间进行比较。
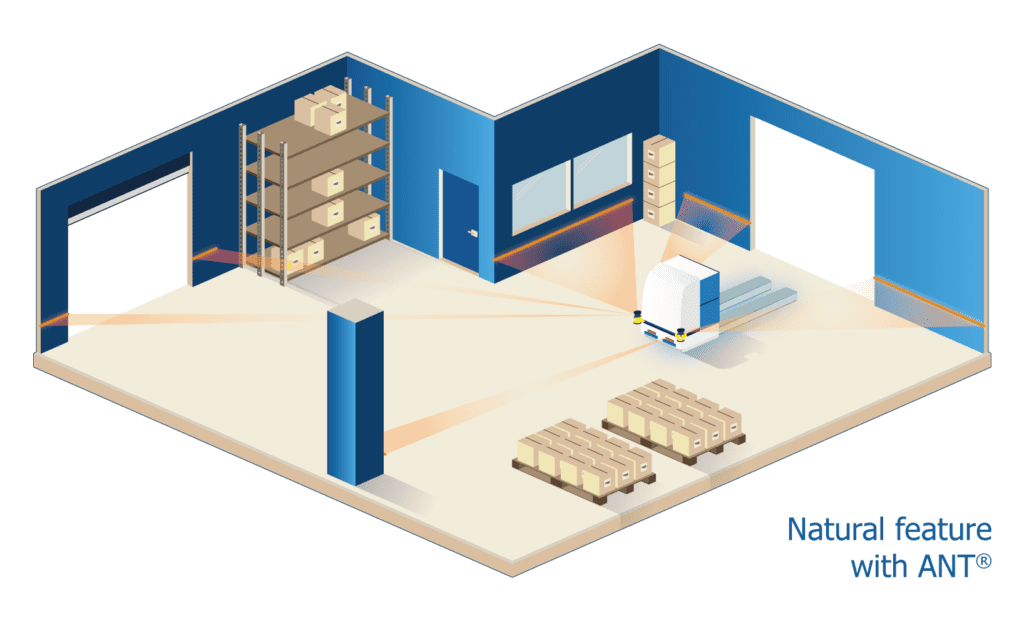
与其他自然特征解决方案类似,ANT导航技术的安装简便快捷,仅需少量的基础结构更改。由于路径是虚拟的,因此路线的维护和修改也很快,而且更符合成本效益。ANT导航技术通常能提供与稳健激光三角定位导航技术相似的准确性和可靠性。
相比起其他自然特征产品,由于BlueBotics在工业AGV市场拥有20年丰富经验,因此ANT是一种更为成熟的产品 。另外,ANT地图是基于特征而不是基于网格,因此在文件大小方面异常轻便,因此公司更易于处理。
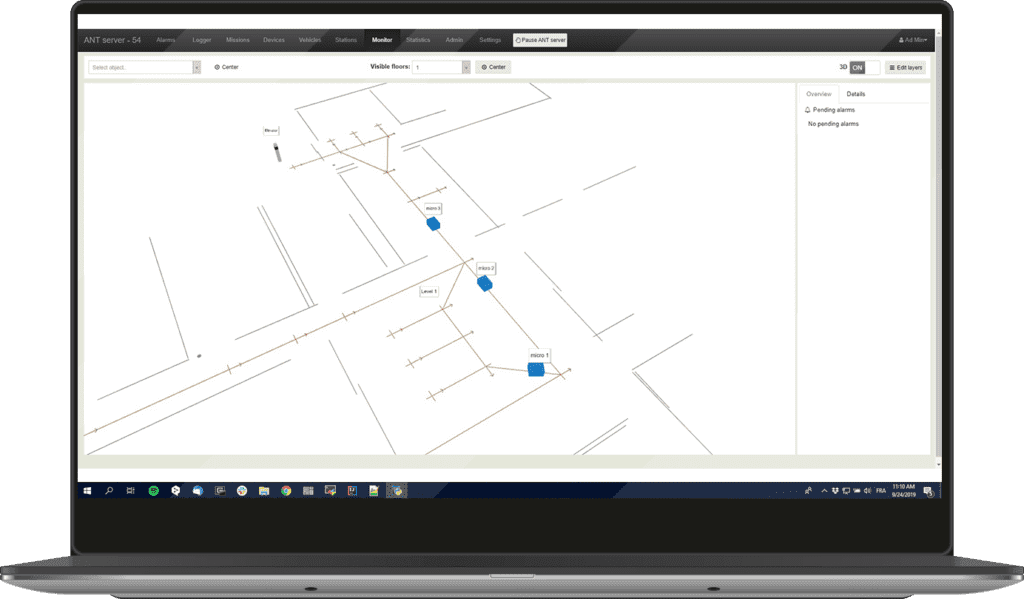
在安装和管理AGV车队时,BlueBotics的ANT server车队管理软件使得创建和管理车辆任务变得简单直接,包括交通管理。
独特的ANT server无需绑定车辆也能独立操作,这意味着不同类型(甚至品牌)的ANT驾驶车辆可以无缝协作,从而扩大用户的选择范围。
ANT 驱动的自然特征导航:优势和劣势

总而言之,相比起大多数的AGV导航方法,ANT导航技术提供了更短的安装时间和更低的基础设施成本。而且它也非常准确可靠,并通过其可选的ANT server软件提供创新先进的车队管理。
AGV导航技术比较

比较本文章和之前文章内容讨论的其他AGV导航方法,自然特征导航技术的表现优于其他导航系统。
ANT导航技术能弥补激光三角定位和基于扫描自然特征导航的市场需求,为车辆制造商和AGV终端用户提供两全其美的优势。自然特征导航具备与三角定位导航类似的速度和灵活性,以及强大功能性,三角定位导航技术在市场上已经存在了很多年。
观看视频:AGV导航技术网络研讨会
想要聆听BlueBotics专家比较当今不同的自主导航技术,千万别错过我们的独家网络研讨会。
_integrated_into_the_vehicle")
让我们开始吧
迈出第一步,使您的车辆自动化。请立即与我们的专家团队联系!