 Skip to content
Skip to contentAGV导航方法1:路线跟随和标签
在开发或升级自动导航车(AGV)或移动机器人时,投资正确的自主导航技术是关键。在涵盖两大部分的专属指南中,我们将从物理路线跟踪技术开始,探讨各种可行的AGV导航方法。
选择错误的AGV导航方法可能会严重影响成本和效率,并因此对您的自动化方案成功与否产生重大影响。这个观念适用于将导航技术集成到车辆的开发阶段,以及将您的车辆投入市场并将其安装到客户现场的未来阶段。
在这个涵盖两大部分的专属指南中,我们将讨论不同的AGV导航选项,以帮助您做出最佳选择。
AGV导航方法:物理线或虚拟化
如同本指南将会解释的内容,目前有许多可行的AGV导航方法。 但是,这些导航技术大致可分为两大类:
- 沿物理线(也称为路线跟随)引导车辆的导航技术。这些路线可以采用磁带、涂漆线、感应线或导轨(如今越来越少使用)方式。为了简单起见,我们也可在此类别中包含标签导航。
- 沿虚拟化(即数字化)路径引导车辆的导航技术,这项技术仅存在于车辆的软件中。
本文重点介绍第一类技术:物理路线和标签导航跟随技术。
此文章内容| 导航到某个区域
路线跟随导航
借助路线跟随导航技术,AGV实际上可以通过物理路线,例如:磁带、感应线(安装在地板内/下方)或涂漆线引导车辆通过设施。
这种方法的工作方式如下:车辆配备一个传感器可以“向下”观看地板的路线。接着,传感器会测量左右误差,并使用此信息校正车辆的轨迹。
这种简单的AGV导航方法非常适用于车辆绕环路连续行驶的运作方式。汽车制造业是一个常见的例子,其中移动机器人会在工作站之间移动零件。
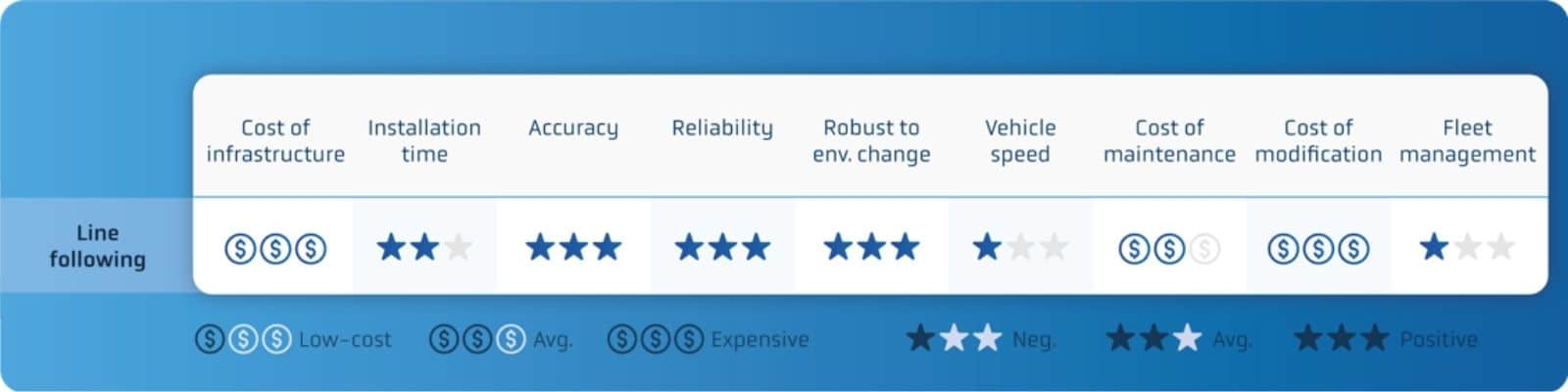
从优势方面分析,路线跟随导航相对简单、非常可靠、准确及稳定。但是,它也有缺点。
- 首先,部署和未来修改路线都需要耗费时间。对于采用安装在地板本身的感应线方式,这个问题尤其显著。
- 虽然未必不可能,但管理一批路线跟随车辆可能相对困难,尤其在几条路线需要重叠交叉的情况。对于复杂的安装,流量管理也可能非常困难。
- 路线本身也可能需要维护 。例如:磁带会随着时间流逝而遭受磨损。
路线跟随:优势和劣势
标签跟随导航
标签跟随导航的工作方式,与物理线跟随方式大致相同。但是,在这种情况下,AGV会通过诸如QR码、RFID标签,或嵌入地面的磁力点标签引导车辆在设施中运行。
无论采用哪种类型的标签,车辆都会配备特定传感器来遵循这些标签所定义的路线。从这个意义层面上分析,这种方法类似于沿线行驶。标签跟随是电子商务中的参考方式,因为简单的路径部署是这类业务的常态。
因此,标签导航的优缺点与以下路线跟随技术极为相似:标签需要花一些时间才能进行物理安装(并在将来进行修改),并且随着时间的流逝需要维护。但是,标签导航的运行非常可靠且强大。
标签跟随:优势和劣势

路线跟随对比标签跟随导航
通过直接比较路线跟随和标签跟随AGV导航方法,我们可以看到这些方法的优点和缺点非常相似。沿线车辆在定位精度方面略微领先(例如:提取和放置物品,以及停靠以进行充电时),但是,它们的行驶速度通常比标签跟随AGV更慢。

观看视频:AGV导航技术网络研讨会
想要聆听BlueBotics专家比较当今不同的自主导航技术,请观看我们的独家网络研讨会。
_integrated_into_the_vehicle")
让我们开始吧
迈出第一步,使您的车辆自动化。请立即与我们的专家团队联系!