 Skip to content
Skip to content解析自然导航方法:扫描匹配与特征匹配
车辆自动化项目的成败取决于其导航技术。这就是稳健灵活自然导航技术成为工业车辆自动化公司热门选择的理由。
车辆自动化项目的成败取决于其导航技术。本文探讨了两种主要自然导航技术之间的区别,以及各自的优缺点。
扫描匹配和特征匹配有什么区别?
简而言之,当今的自然导航技术实现方法有两种:扫描匹配(有时称为 SLAM 导航)和特征匹配(由 ANT应用)。
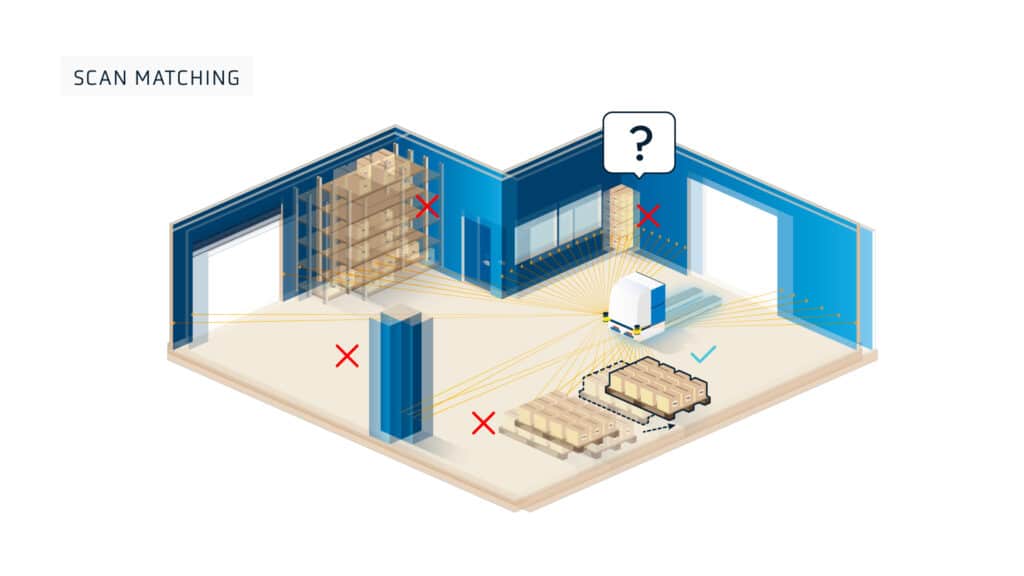
扫描匹配的工作原理
借助扫描匹配技术,来自车辆激光扫描仪的测量结果与基于网格的环境参考地图单元格进行比较(匹配)。这些单元格就类似数字图像中的像素。
为了在地图中定位(定位)自身,导航系统会使用匹配点来计算车辆位置。同时,它会使用测程法,通过计算车辆动作来测量车辆位置变化。在极少数情况下,扫描匹配系统会使用车辆“看到”的内容定期更新参考地图。


特征匹配的工作原理
借助 ANT 特征匹配技术,将车辆激光扫描仪的测量结果与墙壁和柱子等永久地图参考(特征)进行比对(匹配)。如果站点的部分空间不具备足够特征,也可以添加反光贴纸以提供额外参考。
选择匹配特征而不是激光点的重要优势之一是:是由于每个特征的特定大小和角度,使得特征具有高度独特性。因此,它们很容易让系统识别并成功匹配。
为了在地图中定位车辆,ANT接着会使用测程法和特征匹配的组合,从计算中排除所有非永久性的“动态”对象(例如:托盘、箱子、人等)。
由于生成的地图仅包含静态和永久特征的坐标,因此与扫描匹配使用基于网格的地图相比,文件容量相对缩小很多。


车辆能否在无需看清一切的情况下精确导航?
使用特征匹配和使用扫描匹配技术的车辆都需要“看到”并匹配环境中的特征,以精确定位自己的位置。
但是它们需要匹配的环境特征比例差异巨大:
- 扫描匹配技术需要识别至少 60% 的环境才能准确定位。
- 特征匹配技术仅需识别5% 或更少的环境特征即可精确定位。事实上,即使在几秒钟内没有匹配任何特征,由于使用测程法,ANT驱动的车辆也可以有效地导航几米。

因此,ANT驱动的车辆只需识别一小部分环境特征即可有效导航。
AGV 导航扫描仪的位置?
大多数特征匹配(ANT 驱动)车辆不需使用专用激光扫描仪进行导航,而是依靠位于车辆底部的内置安全激光扫描仪。
但是,特征匹配的车辆仍然可以检测到意外物体,比如一堆新的托盘,并依靠其安全系统避免碰撞发生。但是,如上所述,这些动态物体不会被添加到车辆地图中。

然而,使用扫描匹配的车辆通常需要配备额外的激光扫描仪。它通常位于车辆的顶部,以确保尽可能与环境中的更多点进行匹配。
增加额外激光扫描仪的缺点
- 额外扫描仪会为车辆制造商增加额外的组件成本(对于车辆购买者来说,最终价格将会更高)。
- 每增加一个硬件,就会增加一个潜在的故障点。
- 在车辆顶部安装激光扫描仪会限制生产商可以向市场提供的车辆类型。例如 :如何安装此额外的激光扫描仪对于潜伏式AGV是一个巨大设计挑战。
- 安装于车辆顶部的激光扫描仪对于不平整表面或软轮胎引起的倾斜或偏航情况更加敏感。
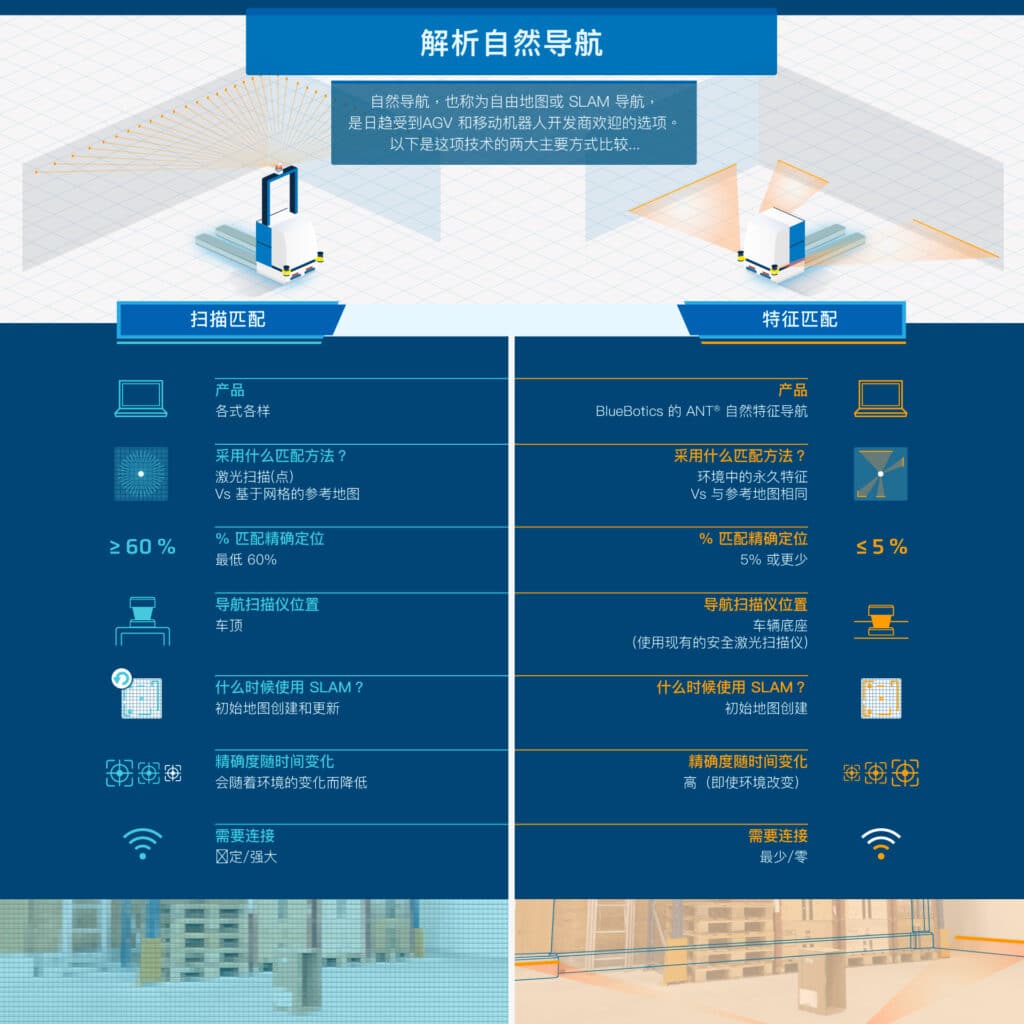
使用自然导航的 AGVS 是否需要互联网连接?
通过特征匹配,除非环境中的永久特征发生变化,否则车辆使用的地图永远不需要更新。因此,ANT驱动的车辆不需要依靠连续稳定的 wifi 网络来运行。 BlueBotics 客户报告指出,“不稳定”的现场 wifi(或蓝牙或其他无线通信)通常就已经足够。唯有与服务器主导的交互情况才需要低带宽连接,例如:当车辆与设备(电梯、自动门)交互和交通控制时。
相比之下,如果车辆使用定期更新地图的扫描匹配技术,则需要高速稳定连续的无线网络连接,然而仓库和车间的情况并非总是如此。这是因为车队中的每辆车都必需从中央服务器下载每张更新的地图,最好是实时下载。请记住,这些基于网格的详细地图文件容量可能非常大。
哪个方法更精确?扫描匹配或特征匹配自然导航?
使用自然导航时确保 AGV 操作的可重复性和可靠性并不容易。然而,事实证明,使用ANT驱动可以实现这两点,而且不会影响精确度(约 ±1 cm / ±1°)。
扫描匹配的车辆定位精确度与其参考地图的单元格大小相当。为了减少文件大小,使用扫描匹配的车辆通常会降级地图,创建三到十厘米的单元格大小。 ANT驱动车辆并没有这方面的限制,因为参考地图仅包含永久特征,文件较小且无需降级。
此外,由于扫描匹配涵盖整个环境寻找匹配,它也会捕获可以移动的动态对象。例如:托盘可能会定期放置在装货码头的某个位置。如果它们始终放置在完全相同的位置且精确度为厘米,这样不会造成任何问题,但实际上这种情况很少。因此,如果这些托盘的放置位置偏离了几厘米,但车辆可能会认为它们在正确的位置,并相应地调整地图的其余部分,将地图锚定到错误位置,这样一来其他点都会变得不准确。
如果使用扫描匹配导航的车辆使用本质上不精确的读数更新参考地图,则任何错误都将上传到系统的车辆管理服务器,并将更新后的地图下载到车队的其余部分,这可能会扩大误差并导致错误更严重。
在同一示例中,ANT驱动的车辆根本不会记录托盘的位置。车辆会忽略这些托盘位置,除非输入指示需与它们进行交互。
如果车辆忽略环境动态物体,有可能会导致碰撞吗?
出于定位目的,ANT驱动的车辆被编程为忽略环境中与地图中的静态特征不对应(匹配) 的物体。这种情况如同在高速公路上驾驶汽车:高速公路之外的物体(例如:房屋和树木)可以被忽略。但是,如果一个物体出现在车辆的路径上会发生什么情况?会不会发生碰撞?
>相关文章:误区 – 避开障碍意味着效率更高?
您会选择哪种自然导航技术?
每个项目都有其独特的挑战。但是,相信ANT导航所具有的易用性、精确性、稳定性和鲁棒性,会给您做出选择提供清晰的依据。
观看我们最近的网络研讨会,深入了解更多导航技术(包括路线跟随和标签跟随)。或者,如果您有任何关于ANT如何帮助您增长业务的疑问,请联系我们。
_integrated_into_the_vehicle")
让我们开始吧
迈出第一步,使您的车辆自动化。请立即与我们的专家团队联系!