 Skip to content
Skip to contentBlog
驾驭移动自动化的世界
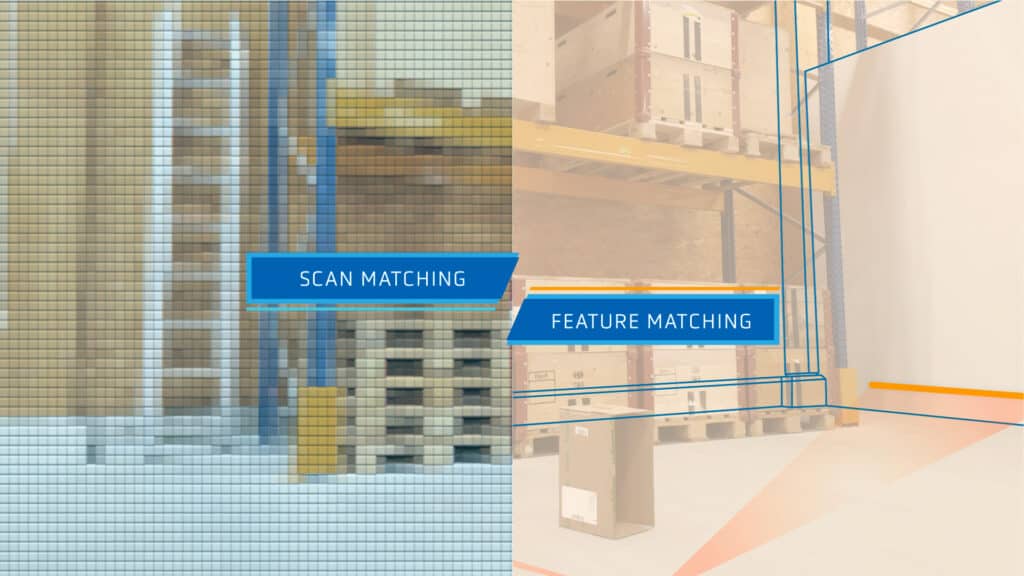
车辆自动化项目的成败取决于其导航技术。本文探讨了两种主要自然导航技术之间的区别,以及各自的优缺点。
阅读更多>>
安全自动化:制造商如何设计AGV安全
有很多关于在自动车辆工作时保持安全的信息。但是,制造商如何确保他们的AGV是安全的,在它击中车间之前?
阅读更多>>
开发AGV时需要避免的5个误区
自动导引车(AGV)的开发是一项复杂的业务。虽然一个强大的、易于使用的移动机器人可以在未来几年内推动您的车辆业务,但要产生这样一个长期盈利的工具,这个过程里充满了潜在陷阱。
阅读更多>>
这是SLAM导航吗? 7个ANT导航神话的破灭
从SLAM问题开始,我们消除了有关BlueBoticsANT导航技术的最常见神话。
阅读更多>>获得电子邮件更新
注册后可定期收到BlueBotics的电子邮件,其中包含我们最新的博客文章和新闻故事。