 Zum Inhalt springen
Zum Inhalt springenKonturnavigation erklärt: Scan Matching vs. Feature Matching
Der Erfolg oder Misserfolg von Fahrzeugautomatisierungsprojekten hängt von der Leistungsfähigkeit der Navigationstechnologie ab. Aus diesem Grund sind robuste und flexible Konturnavigationstechnologien eine beliebte Wahl für Unternehmen, die Industriefahrzeuge automatisieren.
In diesem Artikel werden die Unterschiede zwischen den beiden Haupttypen der Konturnavigation für FTS – „Scan-Matching“ (Scan-Abgleich) und „Feature-Matching“ (Merkmale-Abgleich – sowie ihre jeweiligen Vor- und Nachteile erläutert.
In diesem Artikel
- Was ist der Unterschied zwischen Scan-Matching und Feature-Matching?
- Kann ein Fahrzeug genau navigieren, ohne alles zu sehen?
- Wo befinden sich die Navigationsscanner eines FTS?
- Ist eine Internetverbindung für FTS mit Konturnavigation erforderlich?
- Was ist genauer – Konturnavigation mit Scan-Matching oder mit Feature-Matching?
- Wenn ein Fahrzeug dynamische Elemente der Umgebung ignoriert, führt das zu Kollisionen?
- Welche Konturnavigationstechnologie sollten Sie wählen?
Was ist der Unterschied zwischen Scan-Matching und Feature-Matching?
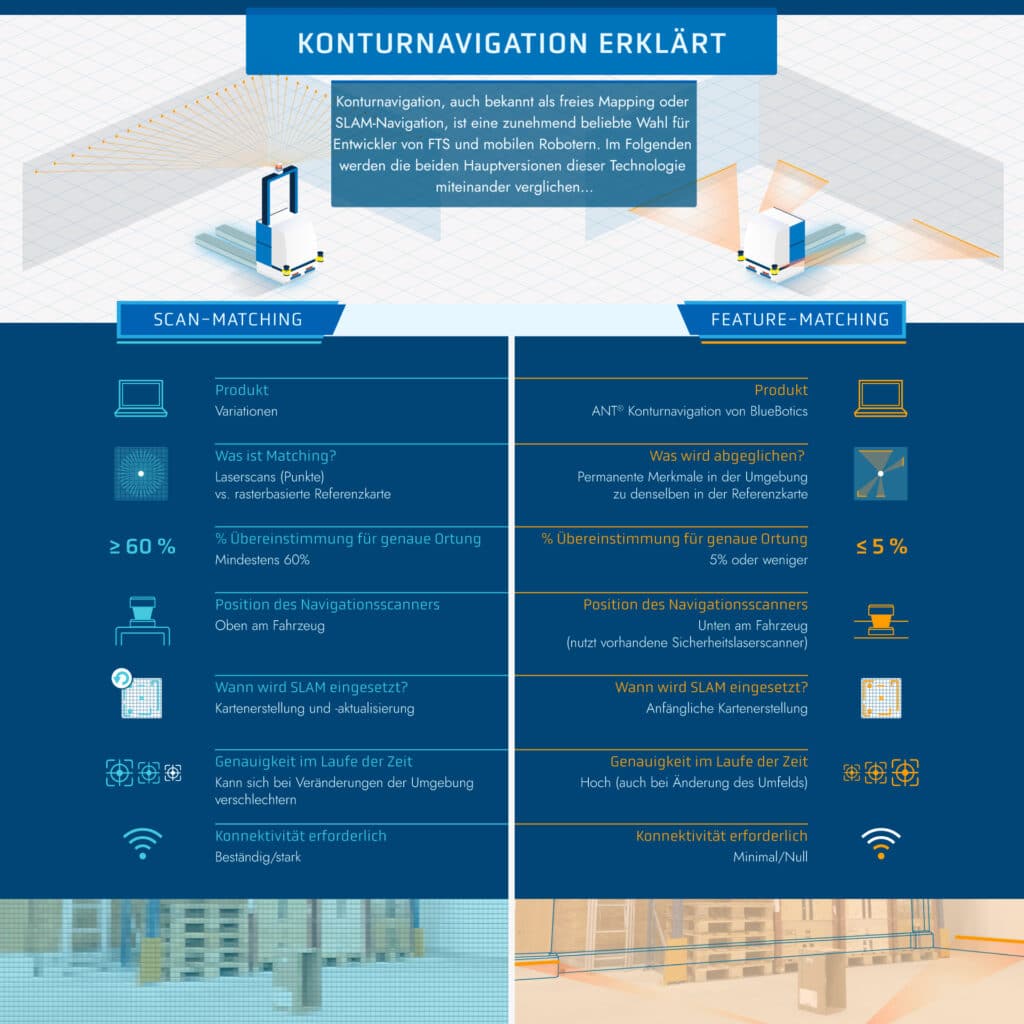
Vereinfacht gesagt, verwenden die heutigen Konturnavigationstechnologien eine von zwei verschiedenen Methoden: Scan-Matching (manchmal auch SLAM-Navigation genannt) und Feature-Matching (von ANT verwendet).
Wie funktioniert Scan-Matching?
Bei der Scan-Matching-Technologie werden die Messungen der Laserscanner des Fahrzeugs mit den Zellen einer gitterbasierten Referenzkarte der Umgebung verglichen (abgeglichen Englisch match). Diese Zellen können mit Pixeln in einem digitalen Bild verglichen werden.
Um sich selbst in der Karte zu positionieren (zu lokalisieren), berechnet das Navigationssystem die Position des Fahrzeugs anhand der abgeglichenen Punkte. Gleichzeitig verwendet es die Odometrie, die die Positionsveränderung des Fahrzeugs durch Berechnung seiner Bewegung misst. In seltenen Fällen wird ein Scan-Matching-System die Referenzkarte regelmäßig mit dem aktualisieren, was das Fahrzeug „gesehen“ hat.


Wie funktioniert Feature-Matching?
Bei der ANT-Technologie des Feature-Matching werden die Messungen der Laserscanner des Fahrzeugs mit permanenten Karten-Bezugspunkten (Merkmalen, Englisch Features) wie Mauern und Säulen verglichen (abgeglichen/match). Sollte ein Teil des Geländes nicht über genügend markante Merkmale verfügen, können auch reflektierende Aufkleber angebracht werden, um zusätzliche Bezugspunkte zu erhalten.
Ein entscheidender Vorteil des Abgleichs von Merkmalen anstelle von Laserpunkten besteht darin, dass die Merkmale aufgrund ihrer spezifischen Größe und ihres Winkels gut unterscheidbar sind. Sie sind daher für das System einfach zu identifizieren und erfolgreich abzugleichen.
Zur Lokalisierung des Fahrzeugs in der Karte verwendet ANT dann eine Mischung aus Odometrie und Feature-Matching, wobei alle nicht-permanenten „dynamischen“ Objekte (wie Paletten, Kisten, Personen usw.) aus den Berechnungen ausgeschlossen werden.
Da die resultierende Karte nur die Koordinaten statischer, permanenter Objekte enthält, ist sie in Bezug auf die Dateigröße viel kleiner als eine gitterbasierte Karte, die beim Scan-Matching verwendet wird.


Kann ein Fahrzeug genau navigieren, ohne Alles zu sehen?
Sowohl Fahrzeuge, die Feature-Matching als auch solche, die Scan-Matching verwenden, müssen Merkmale in der Umgebung „sehen“ und abgleichen, um sich genau zu orten.
Der Anteil der Umgebungsmerkmale, die sie erkennen müssen, ist jedoch sehr unterschiedlich:
- Die Scan-Matching-Technologie muss mindestens 60 % der Umgebung erkennen, um eine genaue Positionierung zu ermöglichen.
- Feature-Matching muss für eine genaue Positionierung 5 % oder weniger der Umgebung erkennen. Selbst wenn mehrere Sekunden lang keine Merkmale abgeglichen werden, können ANT-gesteuerte Fahrzeuge dank der Odometrie einige Meter weit effektiv navigieren.
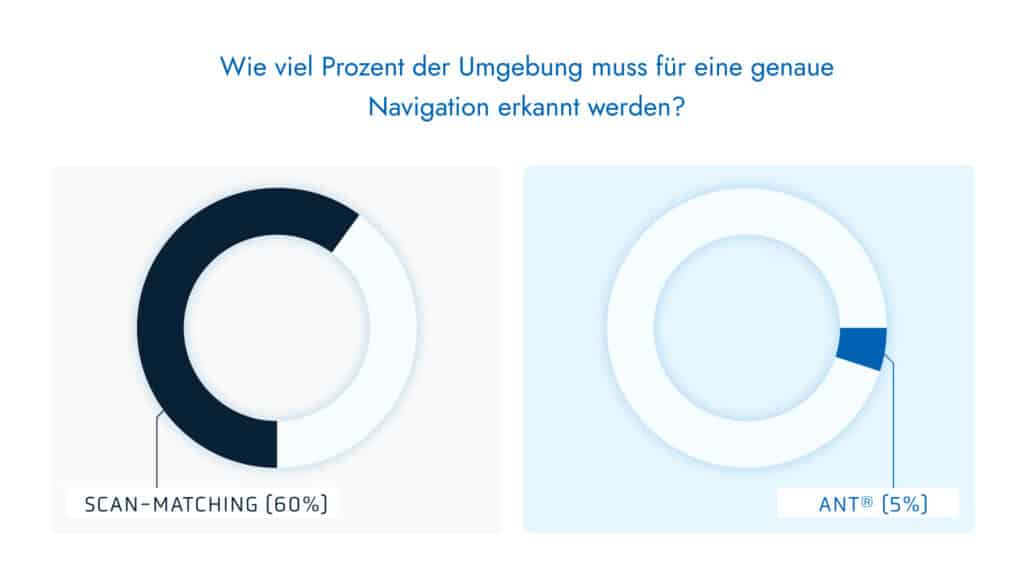
Daher müssen ANT -gesteuerte Fahrzeuge nur einen kleinen Teil der Umgebung erkennen, um effektiv zu navigieren.
Wo befinden sich die Navigationsscanner eines FTS?
Die meisten Feature-Matching-Fahrzeuge (ANT-Fahrzeuge) verwenden keinen speziellen Laserscanner für die Navigation, sondern nutzen ihre eingebauten Sicherheits-Laserscanner, die sich unten am Fahrzeug befinden.
Feature-Matching-Fahrzeuge erkennen daher unerwartete Objekte wie z. B. einen neuen Palettenstapel – und das Sicherheitssystem vermeidet Kollisionen –, aber diese dynamischen Objekte werden, wie oben beschrieben, nicht in die Fahrzeugkarte aufgenommen.

Fahrzeuge, die Scan-Matching verwenden, verfügen jedoch häufig über einen zusätzlichen Laserscanner. Dieser wird in der Regel oben auf dem Fahrzeug positioniert, um sicherzustellen, dass so viele Punkte in der Umgebung wie möglich abgeglichen werden können.
Nachteile der Verwendung eines zusätzlichen Laserscanners
- Die Verwendung eines zusätzlichen Scanners verursacht zusätzliche Kosten für den Fahrzeughersteller (und wahrscheinlich einen höheren Endpreis für den Fahrzeugkäufer).
- Jedes zusätzliche Bauteil stellt eine weitere potenzielle Fehlerquelle dar.
- Die Platzierung von Laserscannern an der Oberseite des Fahrzeugs schränkt auch die Arten von Fahrzeugen ein, die ein Hersteller auf dem Markt anbieten kann. Die Verwendung eines separaten Scanners für die Navigation ermöglicht es einem Fahrzeughersteller beispielsweise nicht, flache Unterfahr- oder „Maus“- FTS herzustellen, die sich unter Transportwagen bewegen können.
- Hoch am Fahrzeug angebrachte Laser sind empfindlicher gegenüber Kippen oder Gieren, das durch unebene Oberflächen oder weiche Reifen verursacht wird.
Ist für Fahrzeuge, die Konturnavigation nutzen, eine Internetverbindung erforderlich?
Beim Feature-Matching muss die Karte, die ein Fahrzeug verwendet, nie aktualisiert werden, es sei denn, es ändern sich permanente Merkmale in der Umgebung. Daher benötigen ANT-gesteuerte Fahrzeuge keinen stabilen, konstanten WLAN-Empfang. BlueBotics-Kunden berichten, dass „sporadisches“ WLAN (oder Bluetooth bzw. andere drahtlose Kommunikation) vor Ort oft ausreicht. Konnektivität mit geringer Bandbreite ist nur für servergesteuerte Interaktionen erforderlich, z. B. wenn Fahrzeuge mit Geräten (Aufzügen, automatischen Türen) verbunden sind, und für die Verkehrssteuerung.
Verwendet ein Fahrzeug dagegen eine Scan-Matching-Technologie, bei der die Karte regelmäßig aktualisiert wird, ist eine stabile, konsistente drahtlose Verbindung erforderlich (was in Lagern und Werkstätten nicht immer gegeben ist). Denn jede aktualisierte Karte muss von jedem Fahrzeug der Flotte von einem zentralen Server heruntergeladen werden, idealerweise nahezu in Echtzeit. Denken Sie daran, dass diese extrem detaillierten, rasterbasierten Karten immense Dateigrößen haben können.
Was ist Genauer – Scan-Matching oder Feature-Matching??
Es ist nicht einfach, die Wiederholgenauigkeit und Zuverlässigkeit des Betriebs eines FTS durch Konturnavigation zu gewährleisten. ANT erreicht dies jedoch langfristig ohne Verlust der Genauigkeit (ca. ±1 cm / ±1°).
Die Genauigkeit der Fahrzeuglokalisierung durch Scan Matching ist vergleichbar mit der Zellengröße der Referenzkarte. Um die Dateigröße zu verringern, werden die Karten von Fahrzeugen, die Scan-Matching verwenden, oft verkleinert, wodurch Zellengrößen zwischen drei und zehn Zentimetern entstehen. Dies ist keine Einschränkung für ANT-gesteuerte Fahrzeuge, da die Referenzkarte, die nur permanente Merkmale enthält, eine kleinere Dateigröße hat und nicht verkleinert werden muss.
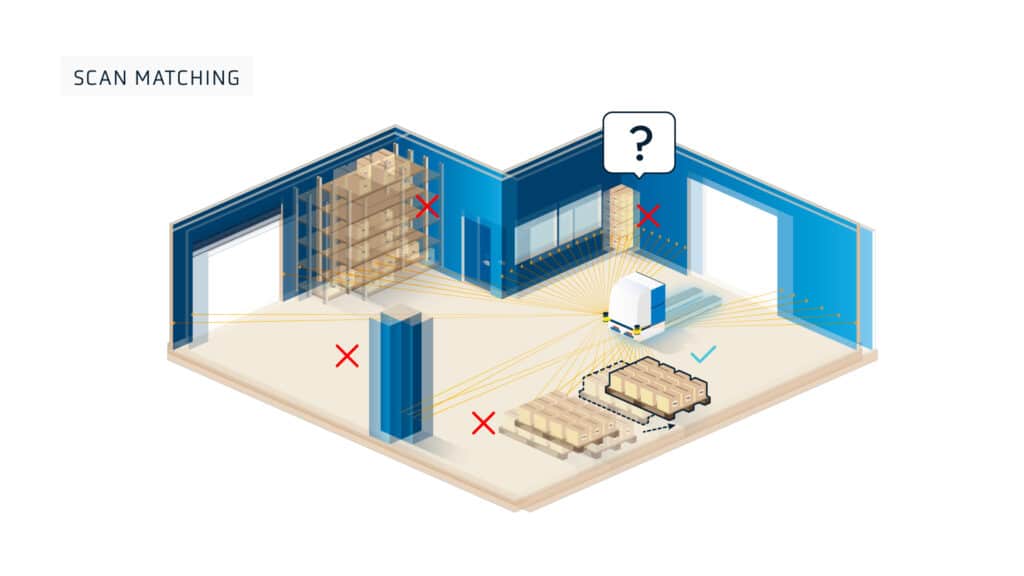
Da der Scanabgleich die gesamte Umgebung erfasst und nach Übereinstimmungen sucht, werden auch dynamische Objekte erfasst, die sich bewegen können. Zum Beispiel können Paletten regelmäßig in einem Bereich der Ladestation platziert werden. Würden sie immer zentimetergenau an der gleichen Stelle platziert, würde dies keine Probleme verursachen. Dies ist jedoch selten der Fall. Wenn diese Paletten also ein paar Zentimeter falsch platziert werden, kann das Fahrzeug davon ausgehen, dass sie sich an der richtigen Stelle befinden, und den Rest der Karte entsprechend anpassen, wodurch die Karte an der falschen Stelle verankert und jeder andere Punkt darin ungenau wird.
Wenn ein Fahrzeug, das die Scan-Matching-Navigation verwendet, die Referenzkarte mit Messwerten aktualisiert, die von Natur aus ungenau sind, werden alle Fehler auf den Fahrzeugmanagementserver des Systems hochgeladen und die aktualisierte Karte auf den Rest der Flotte heruntergeladen, wodurch sich der Fehler möglicherweise ausbreitet und vergrößert.
In selben Beispiel würde ein ANT-gesteuertes Fahrzeug die Position der Paletten überhaupt nicht erfassen. Es würde sie ignorieren, es sei denn, es wird angewiesen, mit ihnen zu interagieren.
Wenn ein Fahrzeug dynamische Teile der Umgebung ignoriert, führt das zu Kollisionen?
> Auch interessant: Mythos – Hindernisumfahrung bedeutet grundsätzlich mehr Effizienz
Welche Konturnavigationstechnologie sollten sie wählen?
Jedes Unternehmen hat seine eigenen, einzigartigen Herausforderungen. Wir sind jedoch der Meinung, dass die ANT-Navigation in Bezug auf Benutzerfreundlichkeit, Genauigkeit und Robustheit im Betrieb für jeden Fahrzeugtyp die beste Wahl ist.
Schauen Sie sich unser aktuelles Webinar an, um einen tieferen Einblick in weitere Navigationstechnologien zu erhalten (einschließlich Spurfolge und Markierungsfolge). Oder wenden Sie sich an uns, wenn Sie Fragen dazu haben, wie ANT Ihrem Unternehmen helfen kann, zu wachsen.
_integrated_into_the_vehicle")
LOS GEHT'S
Machen Sie den ersten Schritt zur Automatisierung Ihres Fahrzeugs.
Vereinbaren Sie noch heute einen Anruf mit unserem Expertenteam.