IST ES SLAM NAVIGATION? 7 MYTHEN ZUR ANT-NAVIGATION WIDERLEGT
Autonome Navigation kann verwirrend sein. Hier zerstreuen wir die häufigsten Mythen über die ANT-Navigationstechnologie von BlueBotics, beginnend mit der SLAM-Frage …
MYTHOS 1: ANT IST SLAM-NAVIGATION
WIDERLEGT: Die ANT-Konturnavigation verwendet während der Navigation kein SLAM. Tatsächlich verwenden fast keine autonomen Navigationslösungen SLAM für die Navigation. Stattdessen verwenden die meisten Technologien – einschließlich ANT – SLAM nur einmal, um ihren Lageplan (Karte) erstmals zu erstellen.
Um diesen Mythos zu widerlegen, müssen wir zunächst erklären, was SLAM-Navigation ist. Simultaneous Localization and Mapping (SLAM), zu Deutsch Simultane Positionsbestimmung und Kartierung, ist ein algorithmischer Ansatz, der von den meisten Arten der Konturnavigation verwendet wird, um eine Karte der Umgebung zu erstellen. Diese Karte wird dann von FTS (Fahrerlose Transportsysteme) verwendet, um ihre Position zu berechnen und durch diese Umgebung zu navigieren.
Randnotiz: Konturnavigation wird zuweilen als „freie Navigation“, „linienlose Navigation“ oder verwirrenderweise auch als „SLAM-Navigation“ bezeichnet.
Bei der Konturnavigation wird SLAM in den meisten Fällen nur zum Erstellen der anfänglichen Referenzkarte eines Standorts verwendet. Dieser Vorgang findet während der Inbetriebnahme (Installation) des ersten Standort-FTS statt.
In einigen seltenen Fällen– bei einigen Varianten der Konturnavigation mit ‚Scan-Matching‘ – wird SLAM jedoch verwendet, um eine gitterbasierte Karte der Umgebung zu erstellen und anschließend regelmäßig zu aktualisieren. Dieser Ansatz bedeutet Herausforderungen in puncto Genauigkeit und Wiederholgenauigkeit, da die Aktualisierung der Koordinaten in der Karte es äußerst schwierig, wenn nicht unmöglich macht, einen stabilen Aufbau zu gewährleisten. Dieser Ansatz zur Aktualisierung der Karte ist auch im Hinblick auf die vor Ort erforderliche drahtlose Konnektivität anspruchsvoll, da die Karte jedes Mal, wenn sie aktualisiert wird, von jedem Fahrzeug in der Flotte nahezu in Echtzeit von einem zentralen Server heruntergeladen werden muss.
Bei der Autonomous Navigation Technology (ANT) von BlueBotics ist dies nicht der Fall. SLAM wird nur einmal verwendet – während der ersten Erstellung der Standortkarte.

So funktioniert die Kartenerstellung mit ANT:
- Um die Karte zu erstellen, fährt ein Integrator das Fahrzeug manuell durch den Standort, wobei die Daten seiner Sicherheits-Laserscanner zum Erstellen der unformatierten Karte verwendet werden. Zur Klarstellung: dieser spezielle Prozess verwendet tatsächlich SLAM.
- Der Integrator entfernt dann mithilfe der ANT lab Software von BlueBotics temporäre oder dynamische Objekte (wie Kisten, Paletten, andere Fahrzeuge usw.) von der Karte.
- Das Ergebnis ist eine saubere Karte, die nur die dauerhaften Merkmale des Standorts wie Wände, Säulen und fest installierte Maschinen enthält (und, falls erforderlich, wenn in der Umgebung nur wenige „natürliche“ Merkmale vorhanden sind, reflektierende Aufkleber).
- Der Integrator definiert dann, welche permanenten Merkmale als Bezugspunkte verwendet werden. Danach vergleicht die ANT-Software diese Bezugspunkte während der Missionen mit den Laserscanner-Daten des Fahrzeugs (auch „Merkmale-Abgleich“ oder „Feature Matching“ genannt), sodass sie die Position des Fahrzeugs genau berechnen und somit effektiv navigieren kann.
Da nur die ursprünglichen, permanenten Merkmale als Bezugspunkte für die Berechnung der Fahrzeugposition verwendet werden, ist eine nachhaltig hohe Präzision gewährleistet – es besteht keine Gefahr, dass sich Messfehler einschleichen und aufaddieren. Die Karte selbst wird nie aktualisiert, d. h. sie bleibt unverändert.
Zum Beispiel führt das allererste, jemals installierte ANT-Fahrzeug –- ein Esatroll Paquito FTS, das 2009 bei Dal Colle (Barilla Gruppe) in Italien in Betrieb genommen wurde – seine Missionen immer noch mit seiner ursprünglichen Karte aus! Die permanente Struktur des Gebäudes hat sich nicht geändert, sodass dies auch für die Karte nicht erforderlich war.
MYTHOS 2: KONTURNAVIGATION IST NICHT ZUVERLÄSSIG
WIDERLEGT: ANT ist äußerst zuverlässig und robust.
Damit wir uns richtig verstehen: Es ist nicht so einfach, die Wiedergenauigkeit und Zuverlässigkeit des Betriebs eines automatisierten Fahrzeugs mithilfe der Konturnavigation mit natürlichen Merkmalen sicherzustellen. ANT erreicht dies jedoch dauerhaft immer wieder, ohne an Genauigkeit einzubüßen.
Bei der ANT-Navigation wird die genaue Position eines Fahrzeugs auf der Karte mithilfe des „Merkmale-Abgleichs“ (Abgleich der permanenten Bezugspunkte in der Karte an die Laserscanner-Daten des Fahrzeugs) und Wegemessung ermittelt, anhand dessen die Positionsänderung des Fahrzeugs durch Berechnung seiner Bewegung gemessen wird. Der Merkmale-Abgleich funktioniert unter anderem deshalb so gut, weil sich Merkmale wie Wand- und Säulensegmente in Bezug auf ihre jeweilige Größe und Winkelstellung deutlich unterscheiden. Das bedeutet, dass sie für ANT einfach zu erkennen und abzugleichen sind.
Im Gegensatz dazu arbeiten die meisten anderen Varianten der Konturnavigation auf der Ebene von Lasermessungen (d. h. Punkten). Diese werden in einer Gitterkarte gespeichert und verwendet, um die Lasermessungen eines Fahrzeugs während des Betriebs abzugleichen (sogenannter „Scan-Abgleich“ oder „Scan Matching“).
Anders ausgedrückt, arbeitet ANT auf einer höheren Abstraktionsebene: Anstatt auf der Ebene der Lasermessungen (Punkte), arbeitet es auf der Ebene der Strukturen (Wände, Säulen usw.). Dies macht den Abgleich-Prozess von ANT, und damit seine Karte, robuster und unempfindlicher gegen dynamische Änderungen in der Umgebung. Da keine temporären Objekte kartiert werden – diese werden ja während der Inbetriebnahme aus der Karte entfernt –, wird ein möglicher Faktor aufaddierter Positionierungsfehler eliminiert. Solange sich die permanenten „natürlichen Merkmale“, die für die Fahrzeugpositionierung verwendet werden, nicht ändern, gibt es also keinen Grund, dass sich die Genauigkeit des Betriebs eines ANT-gesteuerten Fahrzeugs verschlechtert.
Wenn unser Team bei BlueBotics mit langjährigen Kunden über ihre Analysen und Tests verschiedener FTS-Führungstechnologien spricht, ist die Robustheit von ANT der Grund, warum viele BlueBotics als bevorzugten Navigationspartner auswählen und behalten.

MYTHOS 3: HINDERNISUMFAHRUNG BIETET GRUNDSÄTZLICH MEHR EFFIZIENZ
WIDERLEGT: Das Umfahren von Hindernissen eignet sich für einige Szenarios, aber die virtuelle Streckenverfolgung ist häufig (anders als zu erwarten wäre) effizienter.
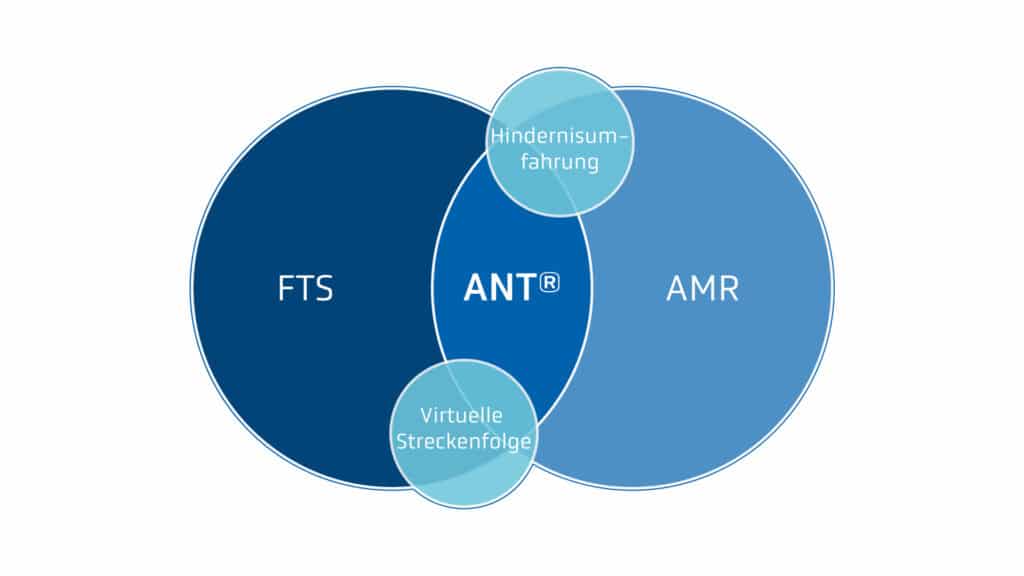
Wenn es darum geht, sich autonom durch eine Umgebung zu bewegen, verwenden mittels Konturnavigation gesteuerte FTS und AMR normalerweise einen von zwei Modi:
- Virtuelle Streckenfolge: Das Fahrzeug hält an, wenn ein Hindernis die zugewiesene Strecke blockiert, oder
- Hindernisumfahrung: Das Fahrzeug navigiert dynamisch um jedes Hindernis herum und versucht dann, so schnell wie möglich zu seiner zugewiesenen Strecke zurückzukehren.
Die ANT-Navigation bietet beide Ansätze, aber welcher ist der effizienteste? Das hängt von der Anwendung ab.
Bei Servicerobotern wie den Roboter-Bodenreinigern von Cleanfix müssen diese jeden Zentimeter des Bodens in einem definierten Bereich abdecken, wobei die Reihenfolge der Abdeckung zweitrangig ist. An ihren Einsatzorten, wie in Einkaufszentren, gibt es zudem viele Hindernisse, wie zum Beispiel herumlaufende Personen. In solchen Fällen ist der Ansatz der Hindernisumfahrung eine gute Lösung.
In industriellen Anwendungen, in denen FTS zur Automatisierung des Materialtransports verwendet werden, mag dies zwar auf den ersten Blick nicht logisch erscheinen, aber meistens ist das von der virtuellen Streckenfolge verwendete Prinzip „Anhalten und Warten“ am effizientesten.
Dr. Nicola Tomatis, CEO von BlueBotics, erklärt: „Selbst bei einer perfekten Hindernisumfahrung verlangsamt sich das Tempo Ihrer FTS oder AMR, wenn sie um Objekte navigieren müssen, im Vergleich zu Streckenfolgern, bei denen das Personal daran gewöhnt ist, die Strecken freizuhalten.“
Darüber hinaus macht eine vollständige Hindernisumfahrung ein optimales Verkehrsmanagement nahezu unmöglich. Somit kann die Leistung einer gesamten Flotte durch die Freiheit eines einzelnen Fahrzeugs, Hindernisse umfahren zu dürfen, stark beeinträchtigt werden.
Dr. Tomatis kommentiert: „Nehmen wir das Feedback, das wir kürzlich von einem Kunden, einem nordamerikanischen FTS-Hersteller, erhalten haben. Einer seiner Kunden, ein Reifenhersteller, betrieb zuvor eine Flotte von 37 FTS, die alle die Hindernisumfahrung verwendeten. Als das Unternehmen beschloss, diese Fahrzeuge nachzurüsten, entschied es sich jedoch für eine reine ANT-Navigation mit Streckenfolge in Verbindung mit dem Flottenmanagement ANT server. Insgesamt installierte die Reifenfirma sieben FTS weniger. Aber die 30 verbliebenen haben sich als 10 % produktiver erwiesen als die vorherigen 37. Wenn es um die Gesamteffizienz geht, macht die Streckenfolge den Unterschied aus.“
> Auch interessan (EN): Hindernisumfahrung für FTS – Traumfunktion oder gefährliche Spielerei? (LinkedIn)
MYTHOS 4: NAVIGATIONSSCANNER MÜSSEN NACH OBEN
WIDERLEGT: ANT verwendet normalerweise die vorhandenen Sicherheitslaserscanner eines Fahrzeugs, die sich unten am Fahrzeug befinden.
Einige FTS mit Konturnavigation verwenden einen speziellen LiDAR-Laserscanner für die Navigation. Dieser Sensor befindet sich normalerweise hoch oben am Fahrzeug, damit er so viel wie möglich von der Umgebung „sehen“ kann.
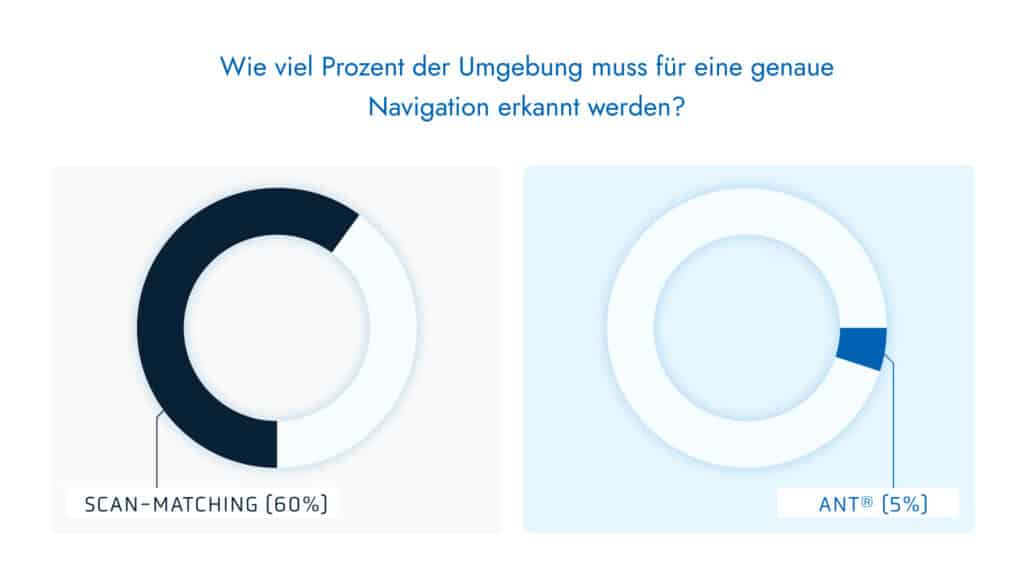
Diese Sensorposition deutet normalerweise darauf hin, dass ein Konturnavigationssystem den Scan-Abgleich anstelle des Merkmale-Abgleichs verwendet (siehe Mythos 2). Da für den Scan-Abgleich in der Regel etwa 60 % der Merkmale eines Standorts identifiziert werden müssen, um gut zu funktionieren, ist es sinnvoll, einen Scanner hoch oben am Fahrzeug zu platzieren: Er kann einfach mehr vom Standort sehen als bei Messungen in Bodennähe.
Bei der ANT Konturnavigation ist diese hohe Scannerposition jedoch nicht erforderlich.
Mit ANT wird die Position eines Fahrzeugs in der Karte mithilfe einer Mischung aus Merkmale-Matching (Abgleich permanenter Kartenbezugspunkte mit den Laserscanner-Daten des Fahrzeugs) und Wegemessung ermittelt, mit der die Positionsänderung des Fahrzeugs durch Berechnung seiner Bewegung gemessen wird. Daher muss ANT nur zwischendurch einige Umgebungs-Bezugspunkte – Wände, Säulen usw. – „sehen“, um eine präzise Fahrzeuglokalisierung zu erreichen.
Anstelle der 60 % der Bezugspunkte, die Scan-Abgleich-Systeme benötigen, arbeitet ANT mit einem hohen Maß an Genauigkeit, wenn die Scanner eines Fahrzeugs nur 5 % – oder sogar weniger – der Umgebung „sehen“ können. Tatsächlich bewegt sich ein Fahrzeug weiter auf seiner Route, selbst wenn während einiger Sekunden keine Merkmale erkannt werden. Die Verwendung der vorhandenen Sicherheitslaser eines Fahrzeugs zur Positionierung – auch wenn sie sich auf Knöchelhöhe befinden und eine relativ eingeschränkte Sicht haben – ist kein Problem.
Zusammenfassend lässt sich sagen, dass es nützlich ist, Navigationsscanner hoch oben in Fahrzeugen zu platzieren, jedoch nur für Systeme, für deren effizientes Arbeiten eine griße Menge an Bezugspunkten erforderlich ist. Das geht auch mit ANT, ist aber nicht wirklich erforderlich.
Zusätzliche Vorteile der Verwendung von Sicherheits-Laserscannern für die Fahrzeugpositionierung
1. Da die ANT Konturnavigation Daten der Sicherheits-Laserscanner eines Fahrzeugs verwendet, eignet es sich für Fahrzeuge jeder Bauform. Verwendet ein Fahrzeug im Gegensatz dazu den Scan-Abgleich zur Positionierung, sodass sein Navigationsscanner hoch oben platziert sein muss, sind Unterfahr-FTS („Maus“) automatisch ausgeschlossen.
2. Die Verwendung der vorhandenen Sicherheitsscanner eines Fahrzeugs anstelle eines separaten Navigationsscanners bedeutet, dass der Fahrzeughersteller eine Komponente weniger kaufen und integrieren muss. Das bedeutet auch eine potenzielle Störungsstelle weniger.
MYTHOS 5: ANT-GESTEUERTE FAHRZEUGE KÖNNEN NICHT IM FREIEN NAVIGIEREN
WIDERLEGT: ANT-Fahrzeuge können im Freien navigieren und tun dies auch.
Der Betrieb von FTS im Freien war traditionell eine echte Herausforderung. Den meisten Außenbereichen mangelt es an natürlichen Merkmalen. In der Vergangenheit war es daher schwierig, die Position eines Fahrzeugs zu berechnen, so dass mitunter zusätzliche Infrastrukturen geschaffen werden mussten.
Unsere Produkterweiterung ANT everywhere stellt sich dieser Herausforderung, indem sie hochpräzises GNSS als zusätzliche Datenquelle für die Berechnung der Fahrzeugposition hinzufügt.
Das Ergebnis ist, dass AGV-Operationen im Freien genauso einfach, robust und präzise sein können wie in Innenräumen.
MYTHOS 6: ANT EIGNET SICH FÜR FTS, ABER NICHT FÜR AMRS
WIDERLEGT: Sowohl FTS als auch AMR (autonom-mobile Roboter) können und werden von ANT gesteuert.
Gemäß dem Sicherheitsstandard für mobile Industrieroboter – Sicherheitsanforderungen ANSI / RIA R15.08-1-2020 (R15.08) gilt: „Der grundlegende Unterschied zwischen FTS und AMR ist dadurch gekennzeichnet, wie sie die angegebene Betriebsumgebung durchfahren. Ein FTS durchfährt die jeweilige Betriebsumgebung automatisch auf vordefinierten Führungsstrecken (virtuell oder physisch) unter Verwendung von Kollisionsvermeidung.“ Laut Standard sind AMRs in der Lage, „die jeweilige Betriebsumgebung durch Erkennen von Hindernissen mithilfe von Sensoren und Anpassen von Strecken durch Berechnung einer hindernisfreien Strecke zu durchqueren, indem sie sich frei bewegen, anstatt einer vordefinierten Strecke zu folgen.“
Welcher automatisierte Fahrzeugtyp passt also zur ANT-Navigation? Die Antwort lautet: beide. Da ANT sowohl die virtuelle Streckenverfolgung (Führungsstrecken) als auch die Hindernisumfahrung unterstützt, kann es alle Fahrzeugarten ansteuern.
Um die Kompatibilität von ANT mit diesen beiden Navigationsmodi zu veranschaulichen, zeigt das folgende Video eine gemischte Flotte von FTS verschiedener Marken (mit virtueller Streckenfolge) und BlueBotics-AMRs (mit Hindernisumfahrung). Alle Fahrzeuge werden von der BlueBotics-Software ANT server in einem einzigen Projekt verwaltet.
MYTHOS 7: ANT MUSS DIE GANZE UMGEBUNG SEHEN, DIE GANZE ZEIT.
WIDERLEGT: Selbst bei minimalen sichtbaren Hinweisen leisten ANT-getriebene Fahrzeuge
Ein weit verbreiteter Irrglaube ist, dass jedes Navigationssystem in der Lage sein muss, ständig zahlreiche Referenzen in der Umgebung zu sehen oder zu identifizieren, damit ein Fahrzeug seine Position genau berechnen kann.
Das ist bei einigen Navigationstechnologien der Fall, nicht aber bei ANT.
Ein ANT-gesteuertes Fahrzeug kann seine Position auch dann berechnen, wenn nur sehr wenige Umgebungsmerkmale sichtbar sind. Ein Grund dafür ist, dass im Positionierungsalgorithmus des Systems die Laserscannerdaten durch eine robuste Odometrie ergänzt werden, die die Geschwindigkeit und Position des Fahrzeugs berechnet. Daher stellt es kein Problem dar, wenn ein oder mehrere Objekte – beispielsweise ein anderes Fahrzeug – die Sichtlinie des Laserscanners zu mehreren Referenzen blockieren. In der Tat ist es äußerst selten, dass ein mit ANT angetriebenes Fahrzeug anhält und sich „verirrt“, da ein Fahrzeug auch dann effektiv arbeiten kann, wenn weniger als 5 % der für die Positionierung verwendeten Umgebungsreferenzen sichtbar sind.
Im Gegensatz dazu müssen SLAM-basierte Navigationssysteme viel mehr Referenzen sehen, um ein FTS auf der Karte zu positionieren oder zu „lokalisieren“ (siehe Mythos 1). Und Laser-Triangulations-Technologien (manchmal auch lasergesteuerte Fahrzeuge oder LGVs genannt) sind stattdessen auf direkten Sichtkontakt zu mindestens drei reflektierenden Zielen gleichzeitig angewiesen, um zu funktionieren.
In diesem Artikel haben wir die häufigsten Mythen über die ANT-Konturnavigation von BlueBotics widerlegt. Wenn Sie weitere Fragen zum Vergleich von ANT mit Scan-Abgleich oder kontinuierlicher SLAM-Navigation haben, empfehlen wir Ihnen On-Demand-Webinar „Wege zum Erfolg“. Oder noch besser: setzen Sie sich mit uns in Verbindung und unser Expertenteam hilft Ihnen gerne weiter.
_integrated_into_the_vehicle")
LOS GEHT'S
Machen Sie den ersten Schritt zur Automatisierung Ihres Fahrzeugs.
Vereinbaren Sie noch heute einen Anruf mit unserem Expertenteam.
