 Zum Inhalt springen
Zum Inhalt springenFTS-Navigationsmethoden 1: Linienfolge und Markierungen
Bei der Entwicklung oder Aufrüstung eines Fahrerlosen Transportsystems (FTS) oder eines mobilen Roboters ist die Investition in die richtige autonome Navigationstechnologie von entscheidender Bedeutung. In diesem exklusiven zweiteiligen Handbuch werden die verschiedenen verfügbaren FTS-Navigationsmethoden erläutert, beginnend hier mit Technologien zur Verfolgung physischer Linien.
Die Wahl der falschen FTS-Navigationsmethode kann sich dramatisch auf die Kosten, die Effizienz und damit den Erfolg der von Ihnen hergestellten automatisierten Lösung auswirken. Dies gilt sowohl in der Entwicklungsphase, wenn Sie die Navigationstechnologie in Ihr Fahrzeug integrieren, als auch in Zukunft, wenn Ihr Fahrzeug auf dem Markt ist und Sie dieses Fahrzeug beim Kunden installieren.
In dieser exklusiven zweiteiligen Serie werden die verschiedenen FTS-Navigationsoptionen erläutert, damit Sie die beste Wahl treffen können.
FTS-Navigationsmethoden: physisch oder virtuell
Wie in diesem Handbuch erläutert wird, stehen zahlreiche FTS-Navigationsmethoden zur Verfügung. Diese können jedoch grob in zwei Kategorien unterteilt werden:
- Navigationstechnologien, die Fahrzeuge entlang physischer Linien führen (Linienfolge oder Spurführung). Diese Linien können in Form von Magnetbändern, aufgemalten Linien, Induktionsdrähten oder (heutzutage seltener) Schienen vorliegen. Der Einfachheit halber können wir auch Markierungen in diese Kategorie aufnehmen.
- Navigationstechnologien, die Fahrzeuge auf virtuellen (d.h. digitalen) Strecken führen, die nur in der Fahrzeugsoftware vorhanden sind.
Dieser Artikel konzentriert sich auf die erste Kategorie von Technologien: physische Linien- und Markierungsfolge.
In diesem Post | Zu einem Abschnitt navigieren
Linienfolge-Navigation
Mit Linienfolge-Navigationstechnologien werden FTS buchstäblich durch eine physische Linie wie Magnetband, Induktionskabel (im / unter dem Boden installiert) oder aufgemalte Linien durch eine Anlage geführt.
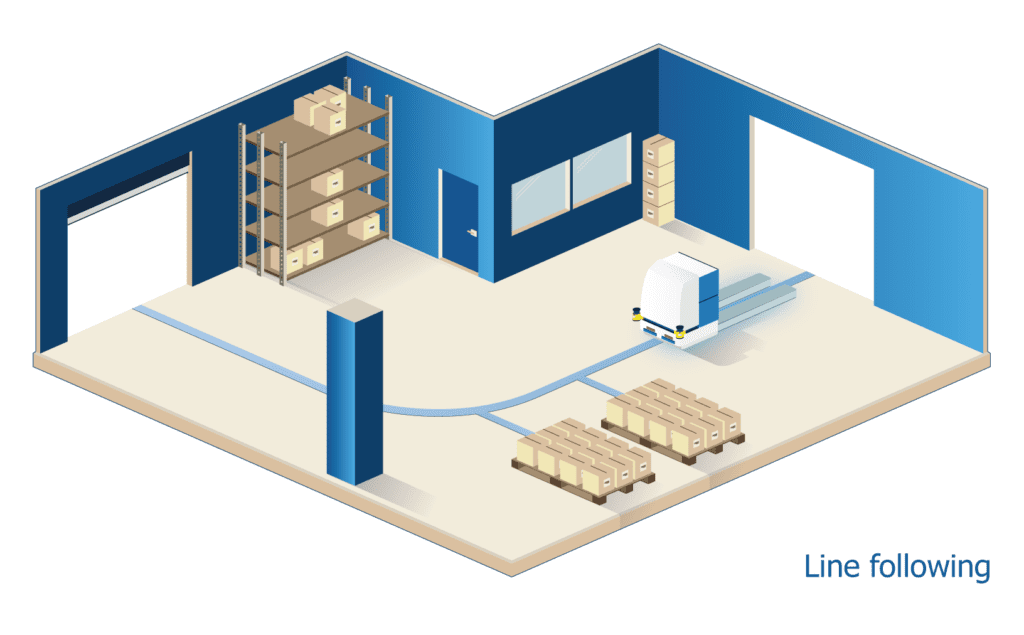
Dieser Ansatz funktioniert folgendermaßen: Das Fahrzeug verfügt über einen Sensor, der auf die Linie auf dem Boden „schaut“. Anschließend misst es den linken und rechten Abweichungsfehler und korrigiert anhand dieser Informationen die Fahrtrichtung des Fahrzeugs.
Diese einfache FTS-Navigationsmethode ist ideal für Anwendungen, bei denen sich ein Fahrzeug kontinuierlich um eine Schleife bewegt. Ein häufiges Beispiel ist die Automobilherstellung, bei der mobile Roboter Teile von Station zu Station bewegen.
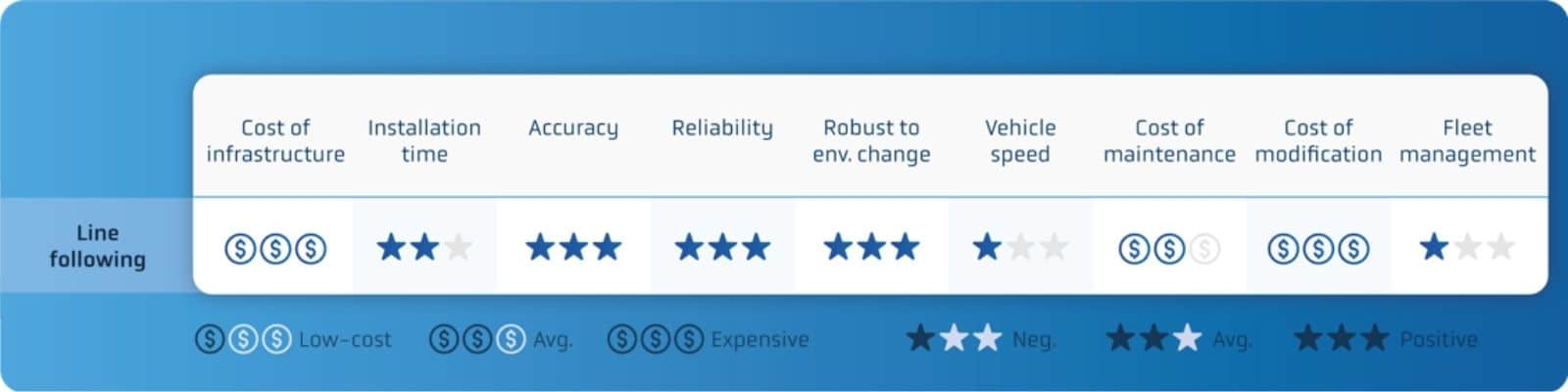
Auf der positiven Seite ist die Linienfolge einfach, außerordentlich zuverlässig, genau und stabil. Sie hat jedoch auch Nachteile.
- Erstens dauert es einige Zeit, Strecken zu erstellen und in Zukunft zu ändern. Dies gilt insbesondere für Induktionskabel, die buchstäblich im Boden selbst installiert sind.
- Das Verwalten einer Flotte von Linienfolge-Fahrzeugen kann schwierig oder gar unmöglich sein, insbesondere wenn sich mehrere Linien kreuzen müssen. Das Verkehrsmanagement kann auch bei komplexen Installationen äußerst schwierig sein.
- Die Linien selbst müssen ggf. auch gewartet werden. Beispielsweise kann ein Magnetband mit der Zeit verschleißen.
Linienfolge: Stärken und Schwächen
Navigation per Markierungsfolge
Die Markierungsfolge funktioniert ähnlich wie das Folgen von physischen Linien. In diesem Fall werden die FTS jedoch durch Markierungen wie QR-Codes, RFID-Tags oder im Boden eingebettete Magnetpunkte durch eine Anlage geführt.
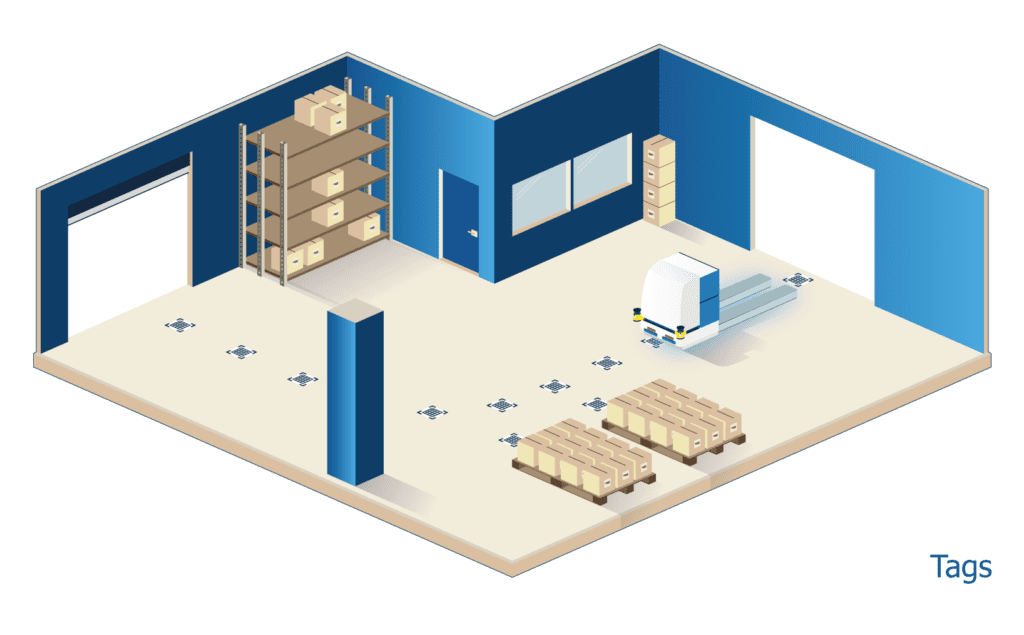
Unabhängig von der Art der Markierung ist das Fahrzeug mit einem speziellen Sensor ausgestattet, der einer durch diese Markierungen definierten Strecke folgt. In diesem Sinne ist dieser Ansatz genau wie das Folgen von Linien. Das Folgen von Markierungen ist Standard im E-Commerce, wo einfache Streckenlayouts üblich sind.
Die Vor- und Nachteile der Markierungs-Navigation sind daher denen der Linienfolge sehr ähnlich: Die physische Installation (und zukünftige Änderung) von Tags nimmt Zeit in Anspruch, und eine Wartung wird im Laufe der Zeit erforderlich sein. Markierungen sind jedoch außerordentlich zuverlässig und robust im Betrieb.
Markierungsfolge : Stärken und Schwächen

Liniefolge vs. Markierungsfolge
Durch den direkten Vergleich von Linien- und Markierungsfolge können wir feststellen, dass diese Ansätze sehr ähnliche Stärken und Schwächen aufweisen. Fahrzeuge mit Linienfolge sind in Bezug auf ihre Positionierungsgenauigkeit (z.B. beim Aufnehmen, Ablegen und Andocken zum Aufladen) leicht im Vorteil. Sie fahren jedoch häufig langsamer als FTS mit Markierungsverfolgung.

Lesen Sie Teil 2, um die virtuellen FTS-Navigationsmethoden zu erkunden.
Webinar: FTS-Navigation
In unserem exklusiven Webinar vergleichen die Experten von BlueBotics die verschiedenen autonomen Navigationstechnologien von heute.
_integrated_into_the_vehicle")
LOS GEHT'S
Machen Sie den ersten Schritt zur Automatisierung Ihres Fahrzeugs.
Vereinbaren Sie noch heute einen Anruf mit unserem Expertenteam.