 Zum Inhalt springen
Zum Inhalt springenFTS-Navigationsmethoden 2: Virtuelle Streckenfolge
In Teil 1 dieses Handbuchs haben wir FTS-Navigationsmethoden erläutert, die physischen Linien oder Markierungen folgen. Hier in Teil 2 untersuchen wir Führungstechnologien, die stattdessen virtuelle Strecken nutzen.
In diesem Artikel diskutieren wir die neuere Generation von FTS-Navigationsmethoden, bei denen ein Fahrzeug virtuellen (oder digitalen) Strecken folgt, die mit der Software eines Fahrzeugs erstellt wurden, anstatt in der Werkshalle verlegt zu werden.
In diesem Post | Zu einem Abschnitt navigieren
Laser-Triangulation
Das Funktionsprinzip der Laser-Triangulation (manchmal auch als Laserzielnavigation oder einfach als Lasernavigation bezeichnet) ähnelt der GPS-Navigation.
Bei der Laser-Triangulation werden mindestens drei Bezugspunkte verwendet, um die Position des Fahrzeugs zu berechnen. Im Gegensatz zu GPS, das Satelliten verwendet, wird bei dieser Methode ein Laserscanner genutzt, der oben auf dem Fahrzeug sitzt. Seine Strahlen werden von Reflektoren zurückgeworfen, die von Experten in der Umgebung installiert werden.
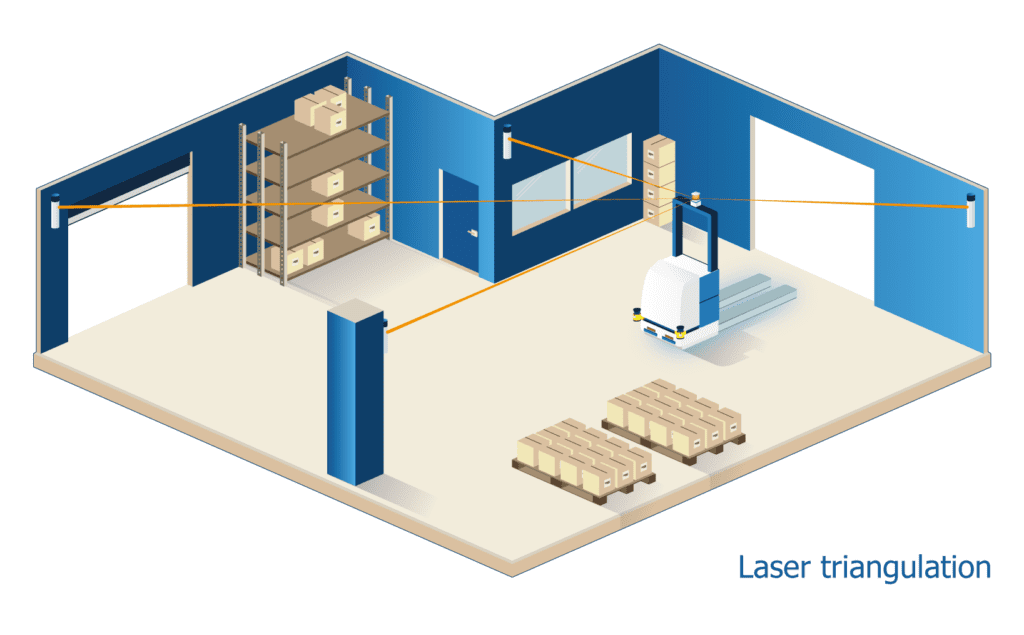
Im Gegensatz zu Linien- und Markierungsfolge-FTS, bei denen die Logik der Mission durch das, was sich auf dem Boden befindet, vorgegeben ist, wird die Logik bei der Triangulation stattdessen mithilfe von Software programmiert.
Wie bei der Linienfolge ist die Laser-Triangulationstechnologie außerordentlich zuverlässig. Sie ist in der Lage, eine hohe Positioniergenauigkeit zu erzielen (erforderlich für effizientes Kommissionieren, Absetzen und Aufladen des Fahrzeugs), und es sind relativ hohe Fahrzeuggeschwindigkeiten möglich.
Da diese Technologie virtuelle Strecken anstelle physischer Linien verwendet, sind die Wartungskosten niedriger und das effektive Flotten- und Verkehrsmanagement viel einfacher als bei Linien und Markierungen. Streckenänderungen sind ebenfalls schnell und einfach – es sei denn, größere Änderungen erfordern die Installation zusätzlicher Reflektoren vor Ort.
Es gibt jedoch Nachteile:
- Die Planung und Installation von Laser-Triangulationssystemen können viel Zeit in Anspruch nehmen. Die Arbeit beginnt mit einer CAD-Software (Computer Aided Design), mit der ein Techniker normalerweise die Anordnung der Reflektoren am gesamten Standort entwirft. Anschließend werden die Reflektoren selbst installiert, gefolgt von einer mehrtägigen Arbeit eines qualifizierten Vermessers, um die Positionen der Reflektoren genau zu messen und die Karte zu erstellen, die die FTS verwenden werden
- Die zur Fahrzeugpositionierung (oder Lokalisierung) verwendeten LiDAR-Laserscanner sind normalerweise hoch am Fahrzeug angebracht, um Reflektoren zu erkennen und Personen oder bewegliche Objekte zu vermeiden, die diese Bezugspunkte möglicherweise verdecken. Diese zusätzliche Komponente erhöht die Fahrzeugkosten und beschränkt einen Fahrzeughersteller effektiv auf bestimmte Fahrzeugtypen, da beispielsweise ein solcher zusätzlicher Sensor nirgends auf einem automatisierten geführten Wagen (AGC) oder einem Maus-FTS platziert werden kann.
Laser-Triangulation: Stärken und Schwächen

Visuelle Führung
Die visuelle Führung (oder Sichtführung) ähnelt der Sichtweise der Menschen auf die Welt. Sie verwendet Kameras anstelle unserer Augen, um Merkmale in der Umgebung zu erkennen. Diese werden dann mit einer 3D-Karte verglichen, sodass das Fahrzeug seine Position berechnen und navigieren kann.
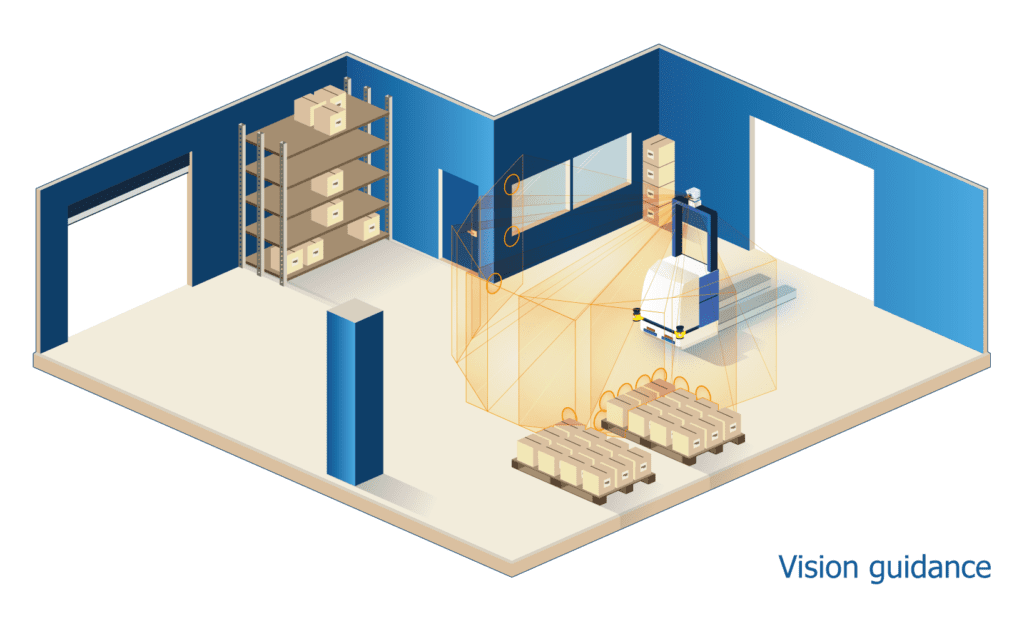
Die Installation von Sichtführungs-FTS ist recht einfach und schnell, da für die Sichtführung keine Änderungen an der vorhandenen Infrastruktur eines Standorts erforderlich sind: Der Benutzer fährt einfach mit dem Fahrzeug entlang der Strecke und sammelt kontinuierlich Bilder, um den Weg und die Position anzulernen und die 3D-Karte zu erstellen.
Der Zeit- und Kostenaufwand für die Wartung eines visuell basierten Systems ist ebenfalls gering, da zum Ändern von Strecken lediglich ein Bediener das Fahrzeug neu anlernen muss, indem er es manuell entlang der neuen Strecken fährt.
Diese Technologie weist jedoch die üblichen Nachteile auf, die mit visuellen Systemen verbunden sind:
- Wechselnde Lichtverhältnisse wie Blendung oder Dunkelheit können die Genauigkeit des Systems beeinträchtigen.
- Kamera- und Bildauflösung können ähnliche Auswirkungen haben wie Änderungen in der Umgebung.
Visuelle Führung: Stärken und Schwächen

Konturnavigation
Bei der Konturnavigation anhand natürlicher Merkmale (manchmal auch als natürliche Navigation oder SLAM-Navigation bezeichnet) werden Laserscanner verwendet, z.B. die bereits in einem Fahrzeug integrierten Sicherheitsscanner. Sie vergleicht das aktuelle gescannte 2D-Bild mit einer zuvor erstellten Karte, um die Position des Fahrzeugs zu berechnen.
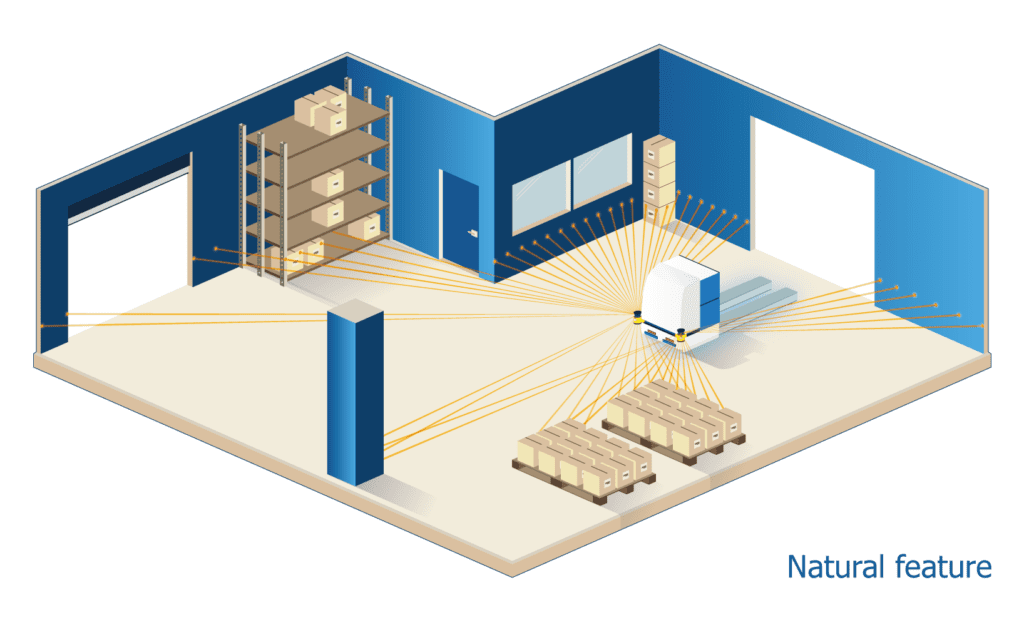
Die Konturnavigation funktioniert auf zwei Arten. Diese Konzepte sind:
- Scan-Abgleich – die Scannerdaten werden mit einer Referenzkarte verglichen und ständig aktualisiert.
- Merkmal-Abgleich – die Daten werden mit permanenten „Merkmalen“ in der Umgebung wie Wänden und Säulen verglichen, ohne die Referenzkarte zu überschreiben.
Beim Scan-Abgleich werden die gesammelten Rohlaserdaten mit der ursprünglichen Karte verglichen und diese Karte wird aktualisiert, wenn neue Objekte erkannt werden. Bei diesem Ansatz muss der Scan von hoher Qualität sein, damit er korrekt übereinstimmt. Der verwendete Kartentyp – gitterbasiert mit niedriger Zellenauflösung – kann sich nachteilig auf die Positionierungsgenauigkeit eines Fahrzeugs auswirken.
Im Gegensatz dazu werden beim Merkmal-Abgleich nur wenige permanente Umgebungsmerkmale – wie Wände, Säulen und fest installierte Maschinen – als Bezugspunkte für die Lokalisierung des Fahrzeugs verwendet. Diese Methode ist äußerst robust, da nur wenige Bezugspunkte (5 % der Umgebung oder weniger) erforderlich sind, um die genaue Lokalisierung eines Fahrzeugs sicherzustellen.
Da sich die Karte nie ändert – es sei denn, dies ist aufgrund einer größeren baulicher Änderung wie z B. versetzte Wände erforderlich – bleibt die Genauigkeit auf Dauer erhalten.
Minimale Änderungen an der Infrastruktur
Im Gegensatz zu den meisten konkurrierenden FTS-Navigationsmethoden sind bei der Konturnavigation keine größeren Änderungen der Infrastruktur vor Ort erforderlich, also keine Installation von Induktionsdrähten oder -magneten, kein Aufkleben von Bändern oder Einrichten von Reflektoren für die Triangulation. Infolgedessen sind mit dieser Technologie gesteuerte FTS einfach und wirtschaftlich zu installieren und zu warten, unabhängig davon, ob es sich um ein einzelnes automatisiertes geführtes Fahrzeug oder eine große FTS-Flotte handelt.
Ähnlich wie bei der visuellen Führung ist die Konturnavigations-Technologie einfach zu installieren, da nur minimale Änderungen an der Infrastruktur erforderlich sind. Es können höchstens einige reflektierende Aufkleber erforderlich sein, wenn ein Bereich nur sehr wenige natürliche Merkmale aufweist.
Ähnlich wie bei der Laser-Triangulation werden bei der Konturnavigation anhand natürlicher Merkmale spezielle Softwaretools verwendet, mit denen die Strecken und Aktionen eines Fahrzeugs während der Installation programmiert werden.
Da die Konturnavigation noch eine relativ neue Technologie ist, bieten die meisten Anbieter noch keine modernen oder intuitiven Softwaretools an, sodass die Installation komplex werden kann. Die Konturnavigation per Scan-Abgleich basiert beispielsweise häufig auf Frameworks wie dem Open-Source-Roboterbetriebssystem (ROS), das diesen Herstellern einen einfachen Einstiegspunkt bietet, für die industrielle Nutzung jedoch viel Zeit und hohe Investitionen erfordert.
Eine zusätzliche Komponente
Wie bei Laser-Triangulationssystemen empfehlen viele Anbieter von Scan-Abgleich-Systemen den Fahrzeugherstellern, einen eigens für die Navigation vorgesehenen Laserscanner hoch oben am Fahrzeug zu installieren, anstatt die bereits in Knöchelhöhe vorhandenen Sicherheitslaserscanner eines Fahrzeugs für die Positionierungsdaten zu verwenden. Dieser Ansatz erhöht die Fahrzeugkosten –eine weitere anzuschaffende Komponente – und schränkt die Fahrzeugtypen ein, die produziert werden können.
Auf der positiven Seite sind Änderungen (Aktualisieren der Streckenführung, Ändern von Aktionen) mit natürlicher Konturnavigation ein schneller und effizienter Prozess, da die Strecken virtuell sind und keine zeitaufwändigen Infrastrukturänderungen erforderlich sind.
Das Flottenmanagement ist ebenfalls weit verbreitet. Da jedoch viele Anbieter von Konturnavigation neu auf dem Markt sind, gibt es nur wenige moderne Flottenlösungen.
Konturnavigation: Stärken und Schwächen

Konturnavigation mit ANT
Im Gegensatz zu anderen Technologien für die Konturnavigation verwendet die Autonomous Navigation Technology (ANT) von BlueBotics den Ansatz des Merkmal-Abgleichs. Das bedeutet, dass die Karte, die für die Fahrzeuglokalisierung verwendet wird, auf Merkmalen basiert und nicht auf der gitterbasierten Karte des Scan-Abgleichs. Merkmale werden mit Merkmalen verglichen und nicht Laserpunkten mit Laserpunkten.
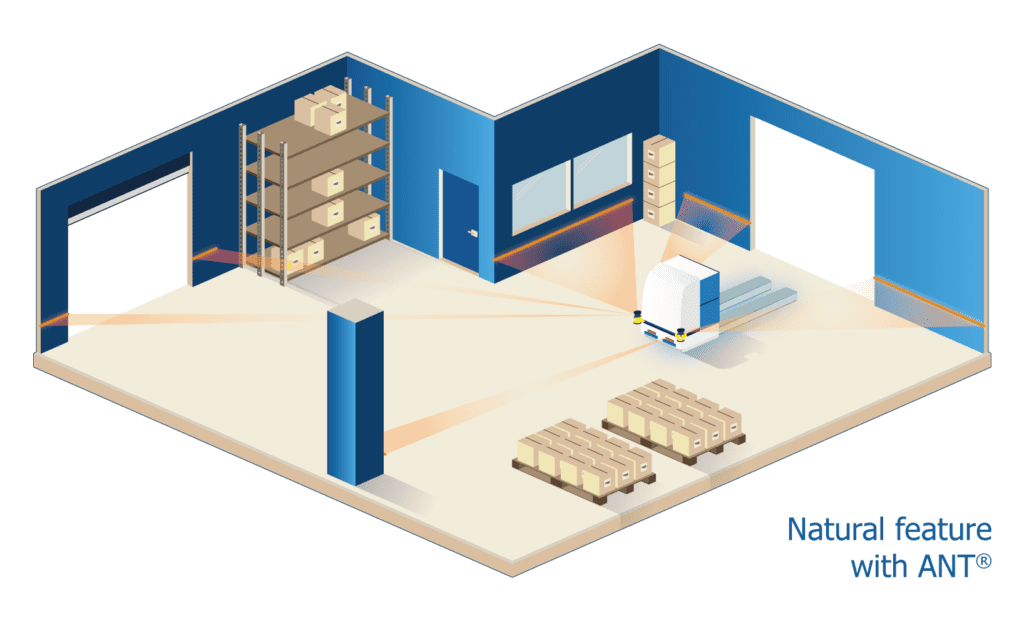
Ähnlich wie bei anderen Konturnavigations-Lösungen ist ANT einfach und schnell zu installieren, wobei nur minimale Änderungen an der Infrastruktur erforderlich sind. Da Strecken virtuell sind, ist die Wartung und Änderung von Strecken ebenfalls schnell und kostengünstig. Im Allgemeinen bietet ANT eine ähnliche Genauigkeit und Zuverlässigkeit wie die etablierten Laser-Triangulationstechnologien.
Aufgrund der 20-jährigen Erfahrung von BlueBotics auf dem Markt für industrielle FTS ist ANT im Gegensatz zu anderen Konturnavigations-Lösungen ein deutlich ausgereifteres Produkt. Da ANT-Karten funktionsbasiert und nicht gitterbasiert sind, sind sie außerdem in Bezug auf die Dateigröße außergewöhnlich kompakt und daher für Unternehmen einfacher zu handhaben.
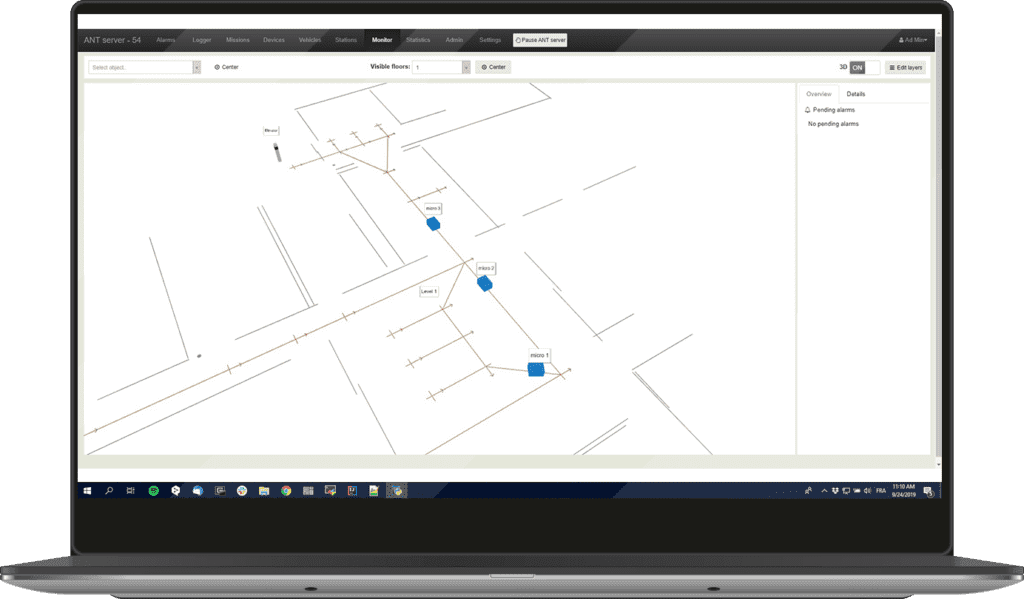
Wenn es um die Installation und Verwaltung von FTS-Flotten geht, erleichtert die ANT server-Flottenverwaltungssoftware von BlueBotics das Erstellen und Verwalten von Fahrzeugmissionen, einschließlich des Verkehrsmanagements.
Einzigartig ist, dass ANT server auch fahrzeugunabhängig ist, was bedeutet, dass verschiedene Typen (und sogar Marken) von ANT-Fahrzeugen nahtlos zusammenarbeiten können, wodurch die Wahlmöglichkeit der Benutzer erweitert wird.
Konturnavigation mit ANT®: Stärken und Schwächen

Zusammenfassend bietet die ANT-Navigation eine kürzere Installationszeit und niedrigere Infrastrukturkosten als die meisten FTS-Navigationsmethoden. Sie ist außerdem genau, zuverlässig und bietet dank seiner optionalen Software ANT server ein erweitertes Flottenmanagement.
Vergleich von FTS-Navigationstechnologien

Im Vergleich zu den anderen in diesem und dem vorherigen Beitrag dieser Serie diskutierten FTS-Navigationsmethoden übertrifft die Konturnavigation andere Führungssysteme.
ANT ordnet sich ungefähr zwischen Laser-Triangulation und scanbasierter Konturnavigation auf dem Markt ein und bietet Fahrzeugherstellern und FTS-Endbenutzern das Beste aus beiden Welten: die Geschwindigkeit und Flexibilität der Konturnavigation mit der triangulationsähnlichen Ausgereiftheit und Funktionalität einer Lösung, die seit Jahren auf dem Markt ist.
Webinar: FTS-Navigation
Verpassen Sie nicht dieses exklusive Webinar, in dem die Experten von BlueBotics die verschiedenen FTS-Navigationsmethoden von heute vergleichen.
_integrated_into_the_vehicle")
LOS GEHT'S
Machen Sie den ersten Schritt zur Automatisierung Ihres Fahrzeugs.
Vereinbaren Sie noch heute einen Anruf mit unserem Expertenteam.