 调度管理系统
调度管理系统
 软件工具&拓展
软件工具&拓展
.png?width=1200&height=675&name=BB%20Support%20(1).png)
.png) 工程
工程
.png)

.png) 了解BLUEBOTICS
了解BLUEBOTICS

定位
ANT localization+使用激光扫描仪获取的数据和测程法在地图中定位车辆,并以环境中的永久性结构(特征)作为参考。精确到±1 cm /±1°。
路线跟随的仿真
ANT localization+通过向PLC提供与已编程的虚拟路线有关的偏移数据,有效地替代了沿着物理路线使用的天线。


嵌入式任务控制
使用ANT,任务数据从计算机到车辆的传输仅发生一次(而不是从服务器到车辆连续发送命令)。这大大减少了对网络(例如WiFi)的需求。
系统架构
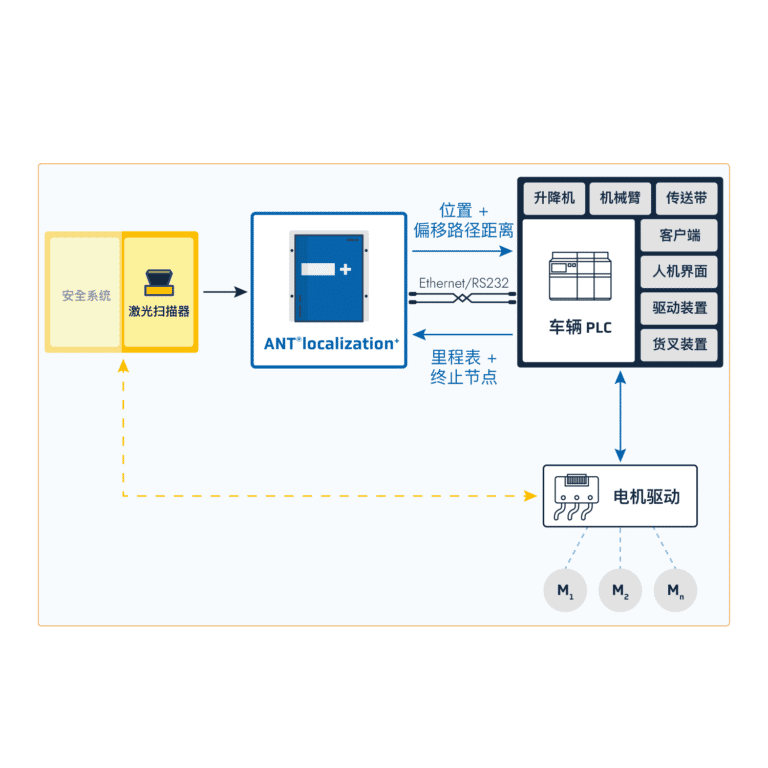
我们的专家团队将为您的ANT localization+集成过程的每一步提供支持。这包括在车辆集成期间访问您的工作现场,以及在首次调试车辆时在您的客户的工作现场提供技术支持。

ANT lab
车辆和任务配置软件


电动叉车的自动化
客户公司:
德国BHS Intralogistics
车辆:
iLifter
导航模块:
ANT localization+


潜伏式AGV的自动化
客户公司:
Kivnon Logística
车辆:
AGV KIVNON K11 TWO-WAY
导航模块:
ANT localization+

重型牵引AGV的自动化
客户公司:
西班牙ASTI Mobile Robotics
车辆:
Tribot牵引AGV
导航模块:
ANT localization+
联系我们
要了解有关ANT localization+的更多信息,请立即与我们的团队联系安排样机演示。
