 Gestion de flotte
Gestion de flotte
 Outils & extensions
Outils & extensions
.png?width=1200&height=675&name=BB%20Support%20(1).png)
.png) Engénierie
Engénierie
.png)

.png) Société
Société

POSITIONNEMENT
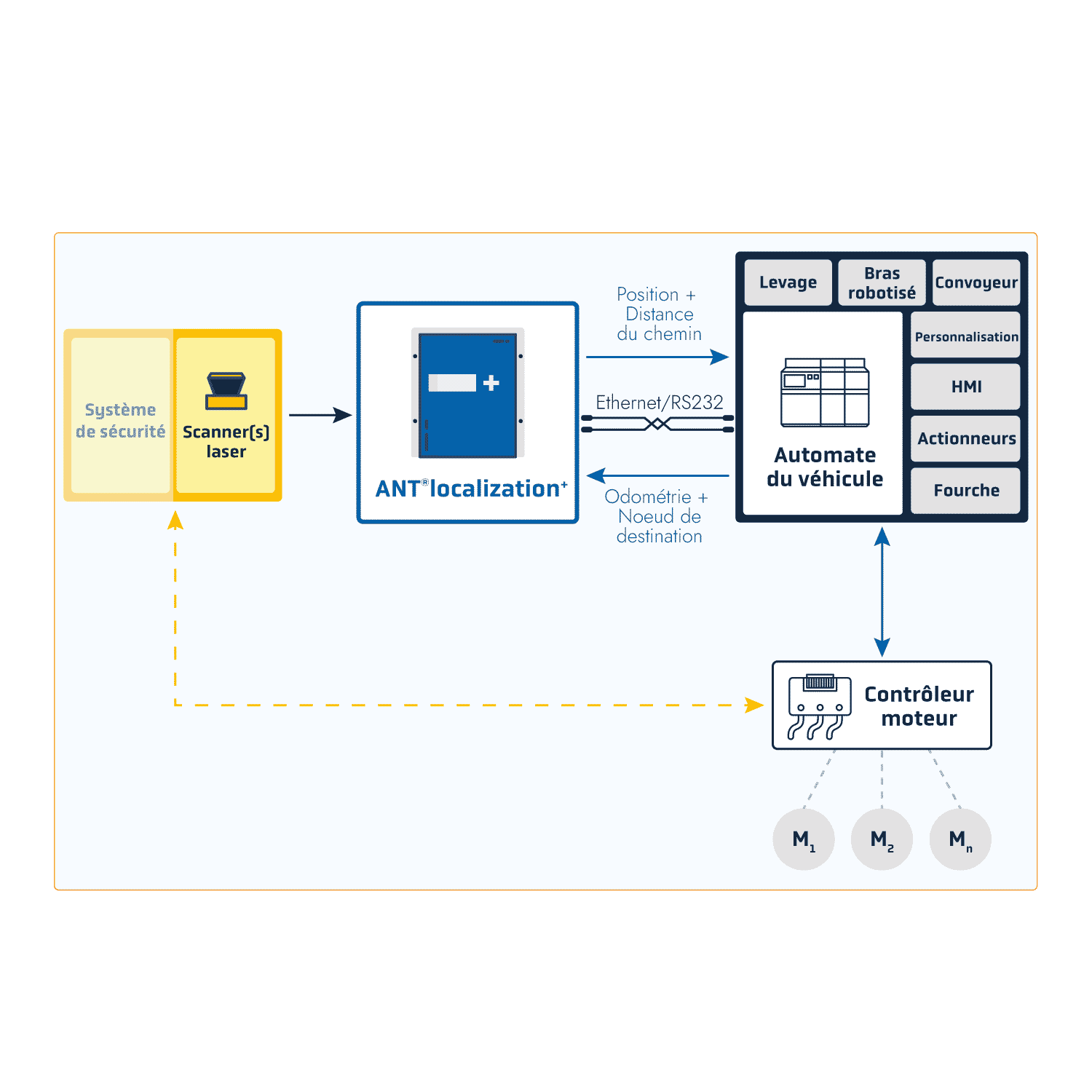
ANT localization+ utilise les données des scanners laser et l'odométrie pour localiser le véhicule sur la carte, les structures permanentes (caractéristiques) de l'environnement servant de références. Précis à ±1 cm / ±1°.
ÉMULATION DE SUIVI DE LIGNE
ANT localization+ remplace efficacement l'antenne utilisée pour suivre les lignes physiques en fournissant à la PLC des données de décalage liées à la ligne virtuelle programmée.

LOGICIEL ANT lab
Chaque système de navigation ANT est fourni avec ANT lab, notre logiciel éprouvé de configuration de véhicule et de mission.

CONTRÔLE DE MISSION INTÉGRÉ
Avec ANT, le transfert des données de mission d'un ordinateur à un véhicule ne se fait qu'une seule fois (au lieu que les commandes soient envoyées en continu d'un serveur à l'autre). Cela réduit considérablement les besoins en réseau (par ex., WiFi).
Architecture
du système
Notre équipe d'experts suit votre intégration ANT localization+ tout au long du processus. Cela comprend la visite de votre entreprise lors de l’intégration de votre véhicule, et l'assistance sur le site de votre client la première fois que votre véhicule est mis en service.

ANT lab
LOGICIEL DE CONFIGURATION DU VÉHICULE ET DES MISSIONS


Automatisation d'un chariot élévateur à fourche électrique

Automatisation d'un AGV « souris »


Automatisation d'un AGV de remorquage de charges lourdes
PARLONS-EN
Pour en savoir plus sur ANT localization+, planifiez un appel-démonstration avec notre équipe dès aujourd'hui.
