Méthodes De Navigation AGV 2 : Suivi De Ligne Virtuelle
Dans la première partie de ce guide, nous avons discuté des méthodes de navigation AGV qui suivent des lignes physiques ou des balises. Dans cette 2ème partie, nous explorons les technologies de guidage qui suivent des lignes virtuelles.
Dans cet article, nous examinons la nouvelle génération des méthodes de navigation AGV avec lesquelles un véhicule suit des lignes virtuelles (ou numériques) créées à l’aide du logiciel du véhicule, plutôt que d’être posées sur le sol de l’atelier.
La triangulation laser
Le principe de fonctionnement de la triangulation laser (parfois appelée « navigation par cible laser » ou simplement « navigation laser ») est similaire à la navigation GPS.
La triangulation laser utilise un minimum de trois références pour trianguler la position du véhicule. Contrairement au GPS, qui utilise des satellites, cette méthodologie utilise un scanner laser qui se trouve au-dessus du véhicule. Ses faisceaux sont réfléchis par des cibles réfléchissantes installées dans l’environnement par des professionnels.
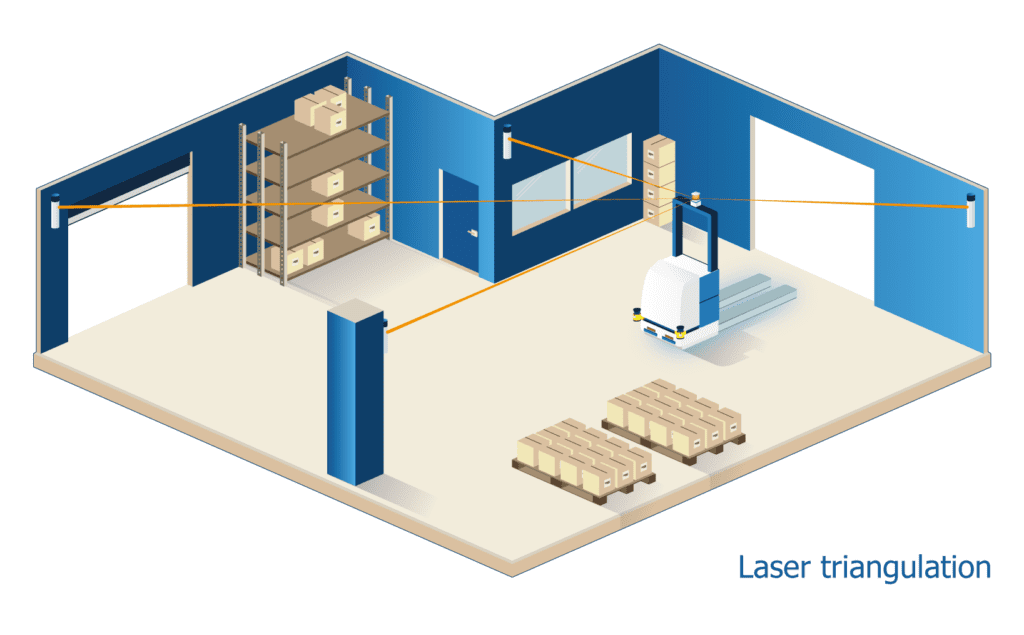
Contrairement aux AGV filoguidés ou guidés par des balises, où la logique de la mission est décrite par ce qui se trouve sur le sol, avec la triangulation, la logique est programmée à l’aide d’un logiciel.
Comme pour le filoguidage, la technologie de triangulation laser est d’une fiabilité exceptionnelle. Elle est capable d’une très grande précision de positionnement (nécessaire pour cueillir, déposer et charger le véhicule avec efficacité) et les véhicules peuvent se déplacer à des vitesses relativement rapides.
De plus, comme cette technologie utilise des lignes virtuelles au lieu de lignes physiques, les coûts de maintenance sont moindres et la gestion efficace de la flotte et du trafic est beaucoup plus facile qu’avec le filoguidage et les balises. Il est également simple et rapide de modifier les itinéraires – à moins que des changements importants ne nécessitent l’installation de réflecteurs supplémentaires sur le site.
Cependant, cette technologie présente des inconvénients :
- La conception et l’installation des systèmes de triangulation laser peuvent prendre beaucoup de temps. Le travail commence dans un logiciel de conception assistée par ordinateur (CAO), qu’un technicien utilise généralement pour concevoir la disposition des réflecteurs sur le site. Ceci est suivi de l’installation des réflecteurs, suivi de plusieurs jours de travail par un géomètre qualifié pour mesurer avec précision les positions des réflecteurs et créer la carte que les AGV utiliseront.
- Les scanners laser LiDAR utilisés pour le positionnement du véhicule (également appelé la localisation) sont généralement montés en hauteur sur le véhicule afin d’identifier les réflecteurs et d’éviter les humains ou les objets mobiles qui pourraient masquer ces références. Ce composant supplémentaire augmente le coût du véhicule et contraint effectivement un constructeur de véhicules à fabriquer certains types de véhicules car, par exemple, il n’y a nulle part où placer un tel capteur supplémentaire sur un chariot à guidage automatique (AGC) ou un AGV « souris ».
La triangulation laser : les points forts et les points faibles

Le guidage par vision
Le guidage par vision ressemble à la façon dont les humains regardent le monde. Il utilise des caméras à la place des yeux pour reconnaître les caractéristiques de l’environnement. Ceux-ci sont ensuite comparés à une carte 3D, permettant ainsi au véhicule de calculer sa position et de naviguer.
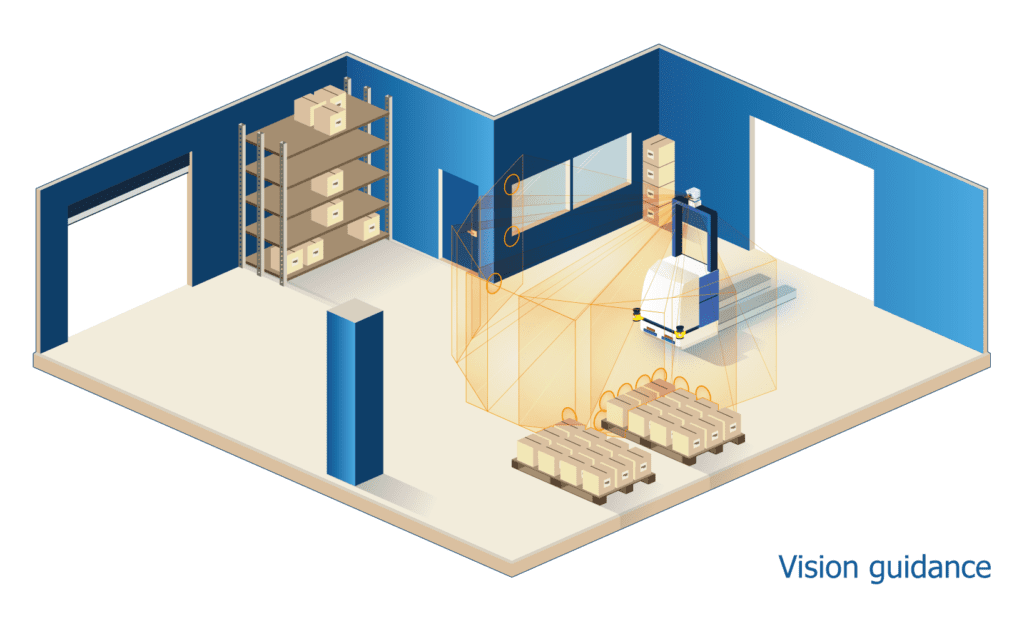
L’installation des AGV de guidage par vision est assez simple et rapide, car le guidage par vision ne nécessite aucune modification de l’infrastructure existante d’un site : l’utilisateur conduit simplement le véhicule le long de l’itinéraire, en collectant continuellement des images, afin d’apprendre le chemin et d’établir la carte 3D.
De même, le temps et les coûts de maintenance d’un système basé sur la vision sont faibles, car le changement d’itinéraire nécessite simplement qu’un opérateur « enseigne » à nouveau le chemin au véhicule en le conduisant manuellement le long des nouveaux itinéraires requis.
Cependant, cette technologie présente les inconvénients habituels associés aux systèmes basés sur la vision :
- Des changements dans les conditions d’éclairage, telles que l’éblouissement ou l’obscurité, peuvent avoir un impact sur la précision du système.
- La résolution de la caméra et de l’image peut avoir des effets similaires, de même que les changements dans l’environnement.
Le guidage par vision : les points forts et les points faibles

La navigation sans infrastructure
La navigation sans infrastructure (parfois appelée « navigation naturelle » ou « navigation SLAM ») utilise des scanners laser, tels que les scanners de sécurité intégrés à un véhicule. Elle compare l’image numérisée 2D actuelle à une carte, créée précédemment, afin de calculer la position du véhicule.
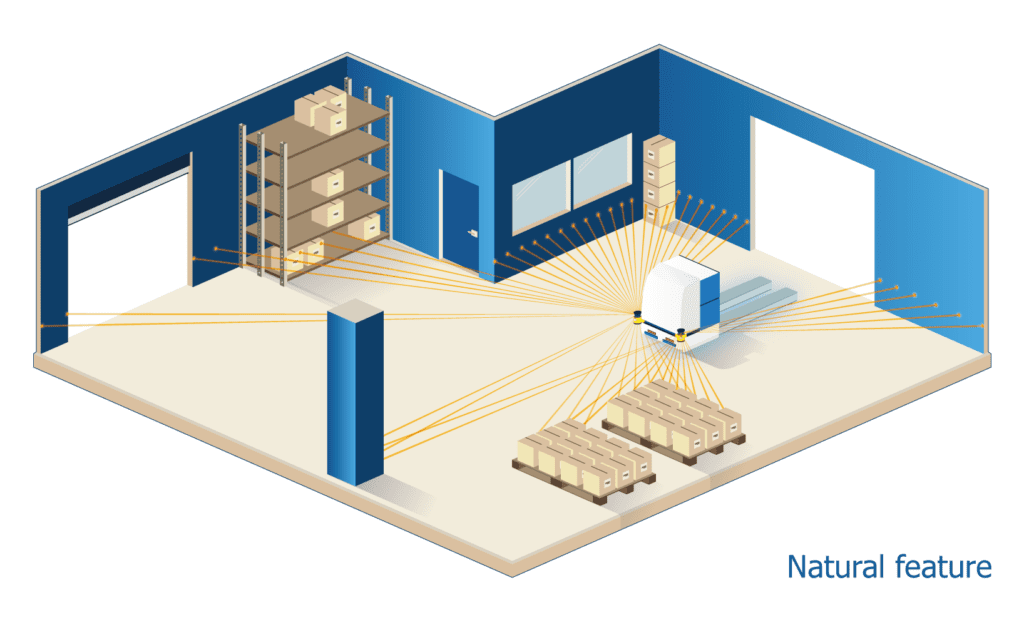
La technologie de navigation sans infrastructure peut fonctionner de deux manières. Ces approches sont :
- La correspondance par scan – les données du scanner sont comparées à une carte de référence qu’elles mettent constamment à jour.
- La correspondance par éléments – les données sont comparées aux « éléments » permanents de l’environnement, telles que les murs et les colonnes, sans remplacer la carte de référence.
Avec la correspondance par scan, les données laser brutes collectées sont comparées à la carte d’origine et cette carte est mise à jour si de nouveaux objets sont détectés. Cette approche nécessite que la numérisation soit de haute qualité afin de correspondre correctement. Le type de carte utilisé – en grille avec une faible résolution de cellule – peut avoir un effet négatif sur la précision de positionnement d’un véhicule.
En revanche, avec la correspondance par éléments, seuls quelques éléments environnementaux permanents – tels que les murs, les colonnes et les machines installées en permanence – sont utilisés comme références pour localiser le véhicule. Cette méthode est très robuste car elle ne nécessite que peu de références (c’est-à-dire 5% de l’environnement ou moins) pour assurer la localisation précise d’un véhicule.
De plus, comme la carte ne change jamais – sauf si exigé par un changement majeur d’infrastructure tel qu’un déplacement des murs – la précision est conservée au fil du temps.
Des changements minimes à l’infrastructure
À la différence de la plupart des méthodes de navigation AGV concurrentes, la technologie sans infrastructure ne nécessite pas d’apporter d’importants changements à l’infrastructure du site, tels que l’installation de fils inductifs ou d’aimants, la pose de ruban adhésif ou la mise en place de réflecteurs pour la triangulation. En conséquence, les AGV équipés de cette technologie sont simples et économiques à installer et à entretenir, qu’il s’agisse d’un seul véhicule à guidage automatique ou d’une grande flotte d’AGV.
Semblable au guidage par vision, la technologie sans infrastructure est simple à installer car elle nécessite des changements minimes à l’infrastructure. Tout au plus, quelques autocollants réfléchissants peuvent être nécessaires si une zone présente très peu de caractéristiques naturelles.
De même que la triangulation laser, la navigation sans infrastructure utilise des outils logiciels dédiés pour programmer les itinéraires et les actions d’un véhicule lors de l’installation.
Cependant, comme la fonctionnalité sans infrastructure est encore une technologie relativement nouvelle, la plupart des fournisseurs n’offrent pas encore d’outils logiciels avancés ou très intuitifs, ce qui peut rendre l’installation complexe. La navigation sans infrastructure basée sur la correspondance par scan, par exemple, repose souvent sur un cadre tel que le système d’exploitation robotique (ROS) open-source, qui fournit un point d’entrée simple pour les fabricants, mais nécessite beaucoup de temps et un investissement élevé pour être industrialisé.
Un composant supplémentaire
Comme pour les systèmes de triangulation laser, de nombreux fournisseurs de correspondance par scan recommandent aux constructeurs de véhicules d’installer un scanner laser – dédié à la navigation – en hauteur sur le véhicule pour les données de positionnement, plutôt que d’utiliser les scanners laser de sécurité du véhicule qui se trouvent à hauteur de la cheville. Cette approche augmente le coût du véhicule – c’est un composant supplémentaire à acheter – et limite les types de véhicules qui peuvent être produits.
Sur le plan positif, la modification des installations (mise à jour des itinéraires, modification des actions) pour la navigation sans infrastructure est un processus rapide et efficace, car les chemins sont virtuels et aucune modification fastidieuse de l’infrastructure n’est requise.
La fonctionnalité de gestion de flotte est également largement disponible. Mais comme de nombreux fournisseurs de la navigation sans infrastructure sont nouveaux sur le marché, les solutions avancées pour les flottes restent rares.
La navigation sans infrastructure : les points forts et les points faibles

La navigation sans infrastructure avec ANT
Contrairement à d’autres technologies sans infrastructure, la technologie de navigation autonome (ANT) de BlueBotics utilise une approche de correspondance par éléments. Cela signifie que la carte utilisée pour la localisation des véhicules est basée sur des éléments plutôt que sur la carte en grille de la correspondance par scan – les éléments sont comparés à des éléments, plutôt que des points laser à des points laser.
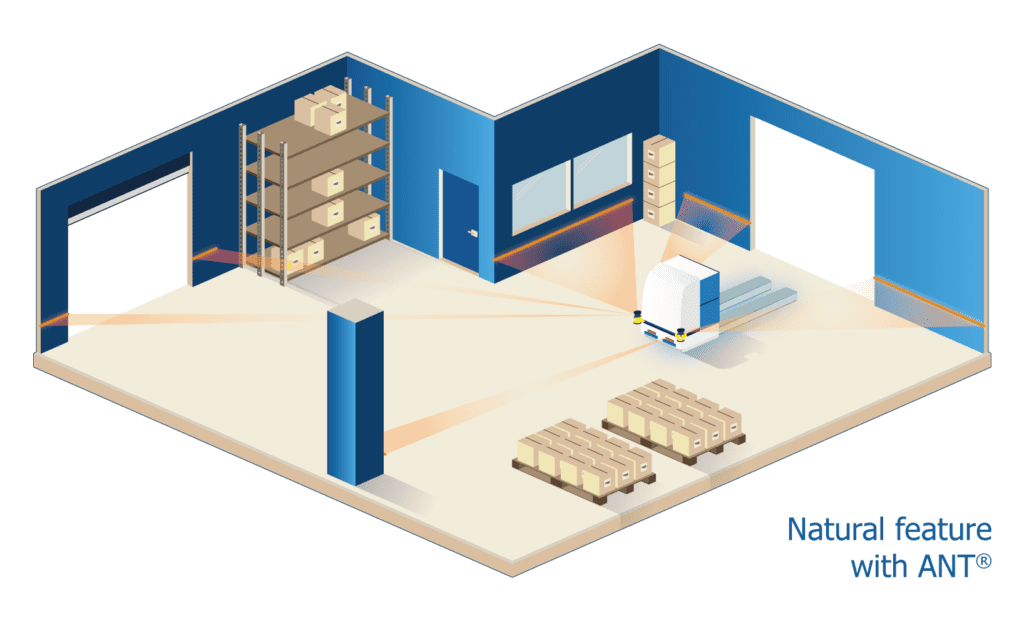
Au même titre que d’autres solutions sans infrastructure, ANT est simple et rapide à installer, avec un minimum de changements requis dans l’infrastructure. Les chemins étant virtuels, la maintenance et la modification des itinéraires sont également rapides et économiques. En général, ANT offre une précision et une fiabilité similaires à celles des technologies de triangulation laser reconnues.
Compte tenu des 20 années d’expérience de BlueBotics sur le marché des AGV industriels, et contrairement à d’autres offres de technologie sans infrastructure, ANT est un produit nettement plus mature. De plus, comme les cartes ANT sont basées sur des éléments et non sur des grilles, les fichiers ont un volume beaucoup moins important et sont donc plus simples à manipuler pour les entreprises.
En ce qui concerne l’installation et la gestion de flottes d’AGV, le logiciel de gestion de flotte d’ANT server de BlueBotics simplifie la création et la gestion des missions de véhicules, y compris la gestion du trafic.
De manière unique, ANT server est également indépendant du véhicule, ce qui signifie que différents types (et même différentes marques) de véhicules pilotés par ANT peuvent fonctionner ensemble de manière homogène, ce qui élargit le choix disponible à l’utilisateur.
La navigation sans infrastructure avec ANT : les points forts et les points faibles

En résumé, la navigation ANT offre un temps d’installation plus court et un coût d’infrastructure inférieur à la plupart des méthodes de navigation AGV. Elle est également précise, fiable et offre une gestion avancée de la flotte grâce à son logiciel ANT server en option.
Comparaison des technologies de navigation AGV

Par rapport aux autres méthodes de navigation AGV évoquées dans cet article et dans le précédent article de cette série, la technologie de navigation sans infrastructure surpasse les autres systèmes de guidage.
Sur le marché, ANT se situe approximativement entre la triangulation laser et la navigation sans infrastructure de correspondance par scan, et offre aux constructeurs de véhicules et aux utilisateurs finaux d’AGV le meilleur des deux mondes : la vitesse et la flexibilité de la navigation sans infrastructure ainsi que la maturité et la fonctionnalité, similaires à la triangulation, d’une solution qui est sur le marché depuis des années.
Regarder : webinaire sur la navigation AGV
Pour entendre les experts de BlueBotics comparer les différentes méthodes de navigation AGV actuellement disponibles, ne manquez pas ce webinaire exclusif.
_integrated_into_the_vehicle")
Commençons
Faites le premier pas vers l'automatisation de votre véhicule.
Planifiez un appel avec notre équipe d'experts dès aujourd'hui.
